魔帆电子RS232lin通信协议详解
需积分: 33 47 浏览量
更新于2024-07-21
收藏 148KB PDF 举报
"魔帆电子公司的RS232lin通信协议是用户自定义的软件协议,主要用于通过u2carbus和rs2carbus控制设备。该协议涉及串口到CAN和LIN总线的通信,包括链路层和应用层两大部分,确保数据的正确传输和解析。"
本文档详细阐述了魔帆电子公司的RS232lin通信协议,该协议旨在支持用户自定义的软件对u2carbus和rs2carbus设备进行控制,从而实现与CAN和LIN总线的交互。
**一、链路层**
1. **串口设置**:默认波特率为115200,8位数据,无奇偶校验,1位停止位。RS232转换设备的波特率可以通过协议更改,但需使用新波特率与设备交互。USB转CAN总线设备的串口波特率不影响实际通信速率,而USB转LIN总线设备的波特率应设置为LIN总线的实际工作波特率。
2. **报文格式**:报文由报文头、长度、数据区、校验和以及报文结束标志组成。
- 报文头标志:0x68
- 长度:16位无符号整数,表示数据区字节数,通常不超过1024字节。
- 数据区:存放具体应用数据,如握手连接、控制发送等。
- 校验和:计算所有字节的模256的累加和,不考虑溢出值。
- 报文结束标志:0x16
**二、应用层**
1. **信息类型**:数据区的第一个字节定义了控制码,指示信息的类型和方向。
- D7位:决定数据传输方向,D7=0表示PC写数据到设备,D7=1表示设备返回数据到PC。
- D6位:在PC写数据时,D6=0表示命令无需确认,D6=1表示需要确认。在设备返回数据时,D6=1表示Lin控制器有信息需要读取,D6=0表示无信息需要读取。
- D5-D0:包含信息类型或命令码,如通用命令、CAN信息帧的发送和接收、CAN波特率设置等。
**控制码的解释**:
- 0x00:命令确认
- 0x01:握手连接命令
- 0x09:同步时间标签定时器
- 0x02:发送CAN信息帧
- 0x03:回传CAN信息帧
- 0x04:设置CAN波特率
- 0x05:设置工作模式
- 更多类型或命令码可能未在摘要中列出,具体应用可能涉及更多细节。
魔帆电子公司的RS232lin通信协议提供了一套规范,使得用户可以高效地通过串口与CAN和LIN总线设备进行通信,并确保了数据传输的可靠性。通过理解并遵循这套协议,开发者能够更好地控制u2carbus和rs2carbus设备,实现各种定制化的功能和应用。
RS2Carbus转换器返回两次,第一次按Can转换器返回;第二次按Lin转换器返回
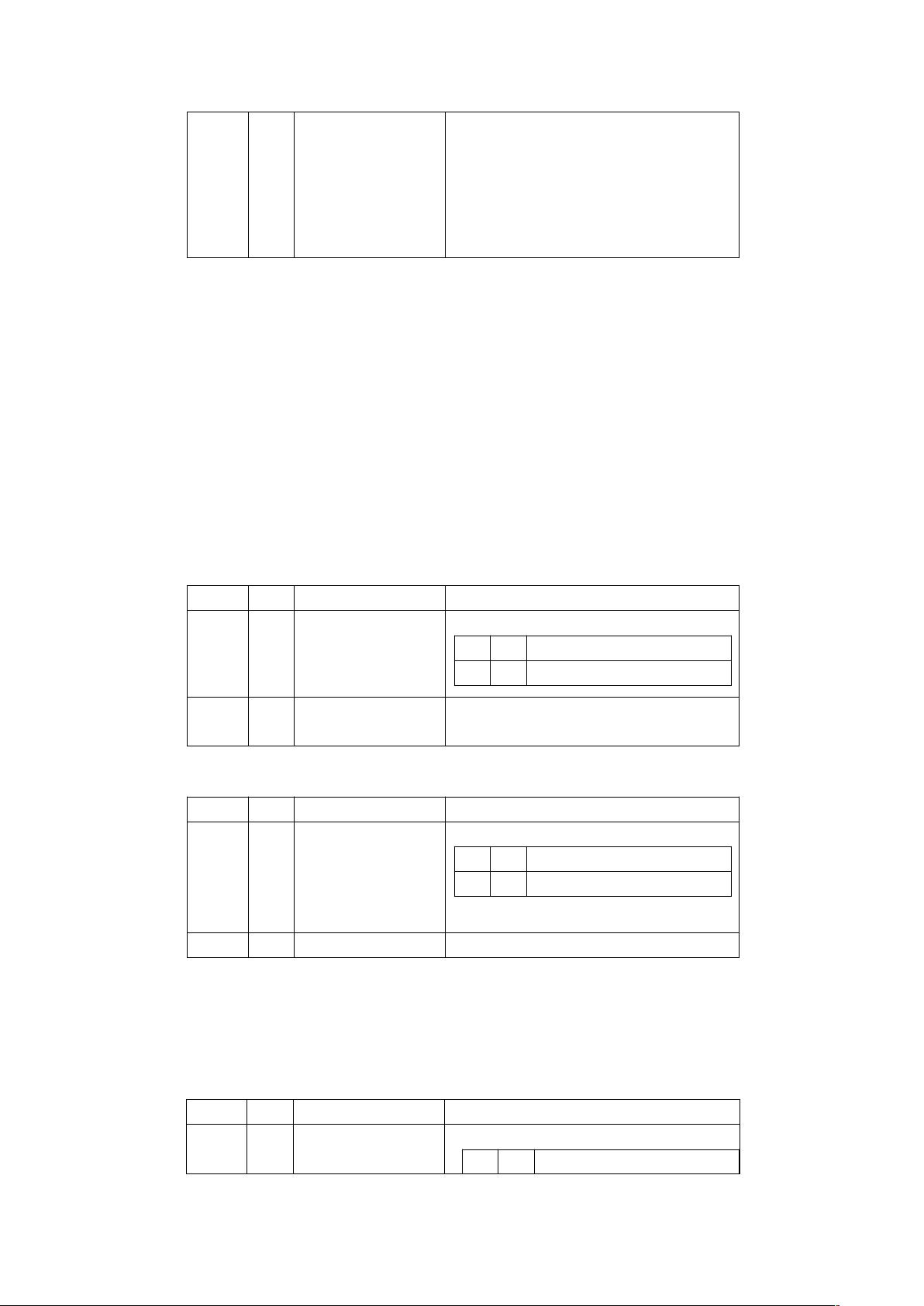
3.3 同步时间标签定时器
设备返回
四 Can 类信息类型和命令
3.1 发送信息帧
Vx.x固件版本号
U2carbusI返回:“U2carbus1-Vx.x”
U2carbusII返回:“U2carbus2-Vx.x”
RS2carbusI返回:“RS2carbus1-Vx.x”
两个字符串之间后字符串间隔符
Offset
Size
Field Description
0 1 握手连接
0x09 或 0x49
D7 D6 D5~D0
0 1 0x09
2 4 定时器赋值 0x00000000~ 0xffffffff
4字节32位无符号整型数,低位在前传输
Offset
Size
Field Description
0 1 确认
0x80 或 0xc0
D7 D6 D5~D0
1 0/1 0x00
1 1 同步时间标签命令 0x09
Offset
Size
Field Description
0 1 信息类型
0x02 或 0x42
D7 D6 D5~D0
剩余15页未读,继续阅读
2015-09-04 上传
2024-10-30 上传
2024-10-30 上传
148 浏览量
点击了解资源详情
点击了解资源详情
2023-06-24 上传

winfeng_hs
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
