模态分析入门:操作模态分析原理与工程应用
需积分: 10 122 浏览量
更新于2024-07-17
收藏 13.91MB PDF 举报
模态分析是结构工程领域中的关键工具,用于研究在环境振动或正常运行条件下系统的行为特性。操作模态分析(OMA)作为一个专业工程方法,它通过对数学模型的动态特性和从实验测量中获取的实际系统属性进行关联,来识别结构系统的模态性质。本资源深入介绍了模态分析的概念和理论,特别关注于操作模态分析,由Rune Brincker和Carlos E. Ventura两位专家共同撰写,出版于2015年。
在本书中,作者首先对模态分析的历史背景和重要性进行了概述,强调了它在设计和维护过程中对于结构系统健康监测、性能评估以及动态响应预测的重要性。他们解释说,通过OMA,工程师能够识别出系统的关键模态频率、模态形状以及模态阻尼,这些都是决定结构稳定性与响应的关键参数。
OMA技术通常涉及实验数据采集,如振动测试或响应谱分析,这些数据被用来构建结构的有限元模型或者频域解析模型。随后,通过比较理论模型和实验数据,可以使用诸如频率响应函数(FFT)、模态识别算法(例如哈密顿方程解法、频率域或时域辨识方法)等技术来估计模态参数。这一过程不仅限于静态结构,还包括动态系统,如机械装置、桥梁、建筑物或航空航天组件。
书中详细讲解了各种模态识别技术的实施步骤,包括但不限于频域数据处理、滤波、特征提取、模态参数估计以及不确定性分析。此外,章节还讨论了模态试验设计、噪声和环境影响的考虑,以及如何处理实际应用中可能出现的复杂性,如非线性行为、多模态系统和混杂效应。
对于那些希望在结构工程、土木工程、机械工程或航空航天领域从事模态分析工作的专业人士而言,这本书是一本宝贵的参考资源。通过学习本书,读者不仅可以掌握理论知识,还能了解到如何在实践中有效地应用OMA技术,确保结构的安全和优化性能。模态分析是现代工程实践中的一个重要分支,其深入理解和应用对于提升结构工程项目的可靠性和效率至关重要。

Introduction 5
can be used to determine natural frequencies, mode shapes, and damping values for the structure’s
principal modes.
1.4 Vibration Testing of Civil Engineering Structures
What makes testing of large civil engineering structures different than testing mechanical systems? As we
have just discussed, the obvious answer to this question is that the forces are larger and the frequencies are
lower in large structures. But there is more than that. First, in general, analytical models of existing large
structures are based on geometric properties taken from design or construction drawings and material
properties obtained from small specimens obtained from the structure. A series of assumptions are also
made to account for the surrounding medium and its interaction with the structure (such as soil-structure
interaction in the case of buildings and bridges, and soil–water–structure interaction in the case of dams,
wharves, and bridges) and the composite behavior of structural elements. This, in general, is not the
case for mechanical systems. And second, in the eld of mechanical engineering, there are a number
of integrated systems that can handle very efciently the experimental testing, system identication,
and model renement. These integrated systems are very sophisticated as they combine the results of
several decades of research in the eld. Due to their relatively small size, most mechanical specimens
can be tested in laboratories under controlled conditions. There is no such advantage for the verication
of dynamic models of large civil engineering structures.
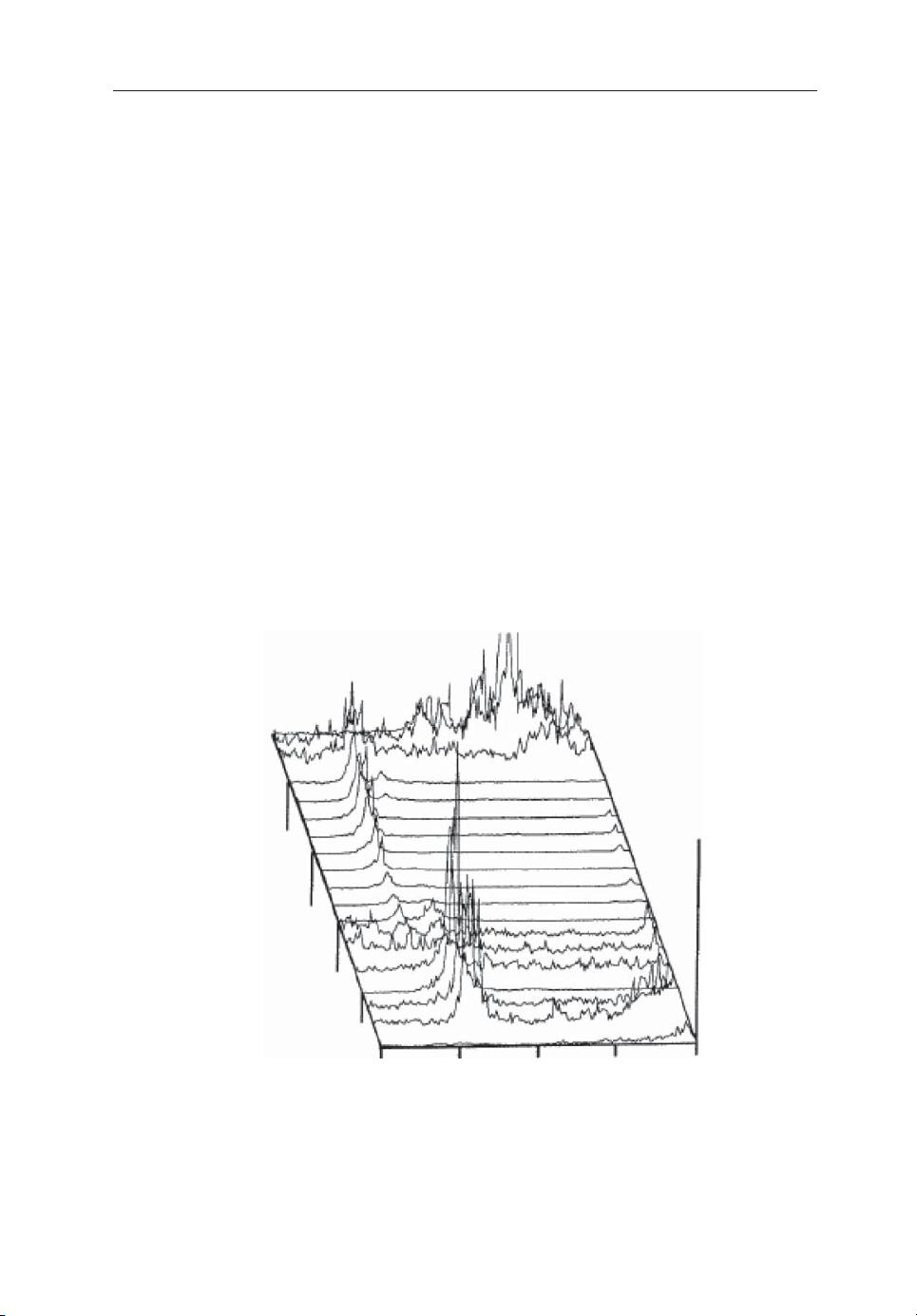
During normal operating conditions, a building is subjected to ambient vibrations generated by wind,
occupants, ventilation equipment, and so on. As we have argued earlier, a key assumption of the analysis
of these ambient vibrations is that the inputs causing motion have “nearly” white noise characteristics
in the frequency range of interest. This assumption implies that the input loads are not driving the sys-
tem at any particular frequency and therefore any identied frequency associated with signicant strong
response reects structural modal response. However, in reality, some of the ambient disturbances, such
as, for instance, an adjacent machine operating at a particular frequency may drive the structure at that
frequency. In this case, the deformed shapes of the structure at such driving frequencies are called oper-
ational modes or operational deection shapes. This means that a crucial requirement of methods to
analyze ambient vibration data is the ability to distinguish the natural structural modes from any imposed
operational modes.
The integrated systems, developed for mechanical engineering applications are not practical and eco-
nomical to test large civil engineering structures. Bridges form vital links in transportation networks and
therefore a trafc shutdown required to conduct a forced vibration test would be costly. Controlled forced
vibration tests of buildings may disturb the occupants and may have to be conducted after working hours,
thus increasing the cost of the testing. Therefore, routine dynamic tests of bridges and buildings must be
based on ambient methods, which do not interfere with the normal operation of the structure.
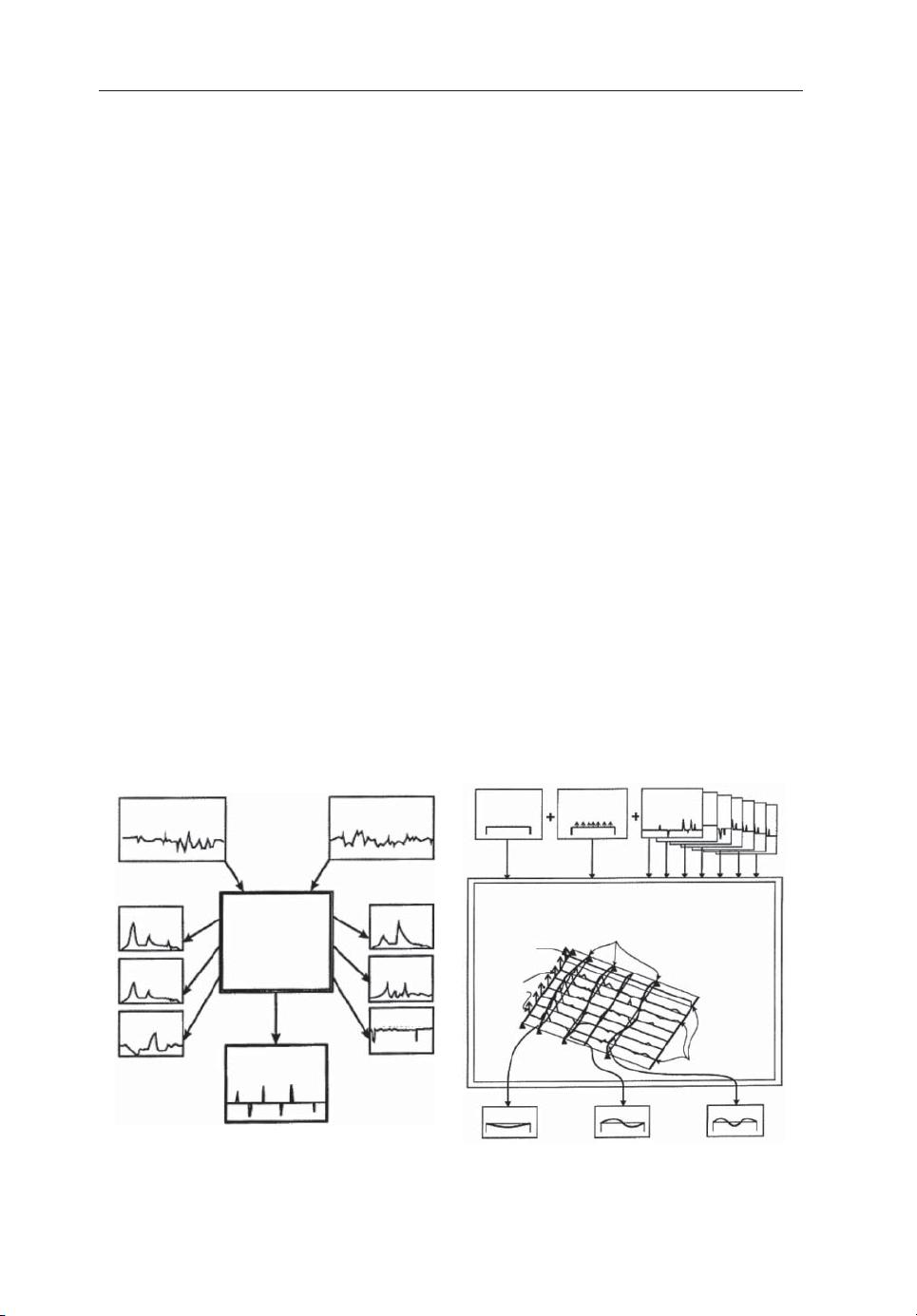
1.5 Parameter Estimation Techniques
The methods that have been developed for analyzing data from forced and in-operation vibration tests
range from linear deterministic models to nonlinear stochastic models. The applications range from
improving mathematical models of systems to damage detection, to identifying the input of a system
for controlling its response. Parameter estimation methods using dynamic signals can be classied as
(a) time-domain methods
(b) frequency-domain methods
(c) joint frequency–time domain methods
The theory behind the rst two methods is described in more detail in this book.

剩余361页未读,继续阅读
2021-08-18 上传
2019-11-19 上传
2022-06-20 上传
111 浏览量
2021-09-14 上传
2021-08-13 上传

augustus93
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
