电磁导航智能小车设计:三次函数算法与差速电机控制
119 浏览量
更新于2024-09-01
1
收藏 244KB PDF 举报
"单片机与DSP中的基于三次函数的电磁导航智能小车设计"
本文主要探讨了在单片机与数字信号处理器(DSP)领域内,如何利用三次函数算法来设计一个电磁导航的智能小车系统。智能小车的设计目标是能够稳定快速地自动寻线,应对包括直角弯、坡道、障碍在内的复杂赛道。系统的核心是"五横二竖加八字"排列的电磁线圈,这种结构能够识别并适应不同的赛道条件。
在硬件设计方面,智能小车采用Kinetis K60单片机作为主控单元,该单片机具有高性能和低功耗的特点,适合处理实时性要求高的任务。传感器模块则利用电磁线圈作为感应元件,能够检测到漆包线中20±2 kHz频率、50至150mA电流范围内的正弦波信号。通过三次函数算法,可以计算出小车相对于理想路径的偏差,进而通过差速电机算法控制小车在弯道上的转向,确保其精准导航。
系统结构中还包括舵机控制模块,用于调整小车的方向;电机驱动模块负责驱动小车前进和倒退;OLED显示模块用于实时反馈状态信息;拨码开关模块用于设定不同模式;编码器测速模块则能精确测量小车的速度和位置;停车检测模块和障碍检测模块则确保小车在遇到障碍或到达终点时能正确反应。电源管理部分由7.2V镍镉电池供电,并通过稳压芯片为各模块提供所需电压。
软件层面,智能小车的控制系统需要编写相应的程序来执行三次函数算法和差速电机控制策略。这些程序需要在Kinetis K60单片机上运行,实时处理传感器数据,计算偏差,并生成适当的电机控制指令,确保小车能够根据赛道情况灵活调整行驶轨迹。
这个基于三次函数算法和电磁导航的智能小车设计,展示了单片机与DSP技术在自动化导航领域的应用潜力。通过精确的控制算法和合理的硬件配置,该系统能够在复杂环境中实现稳定、快速的寻线行驶,达到预期的导航性能。
单片机与单片机与DSP中的基于三次函数的电磁导航智能小车设计中的基于三次函数的电磁导航智能小车设计
摘要:为了实现智能小车稳定快速的自动寻线,采用了“五横二竖加八字”排列的电磁线圈,能识别各种复杂的赛
道。通过三次函数算法求出偏差,并采用差速电机算法处理弯道,实现了电磁导航的功能。实践证明,该系统
能精准地控制智能小车稳定快速地运行,且达到了预期效果。航 智能小车寻线道路设计要求是:在中间铺
设了一条直径为0.5 mm的铜质漆包线,漆包线中有频率范围为20±2 kHz、电流范围为50~150 mA的正弦波信
号。随着智能小车的发展,需适应更加复杂的赛道,例如直角弯、坡道、障碍等。文中设计的智能小车,是基
于Kinetis K60单片机开发实现的,以电磁线圈作为感应传感器,采用偏差算法控制小车精准
摘要摘要:为了实现智能小车稳定快速的自动寻线,采用了“五横二竖加八字”排列的电磁线圈,能识别各种复杂的赛道。通过三
次函数算法求出偏差,并采用差速电机算法处理弯道,实现了电磁导航的功能。实践证明,该系统能精准地控制智能小车稳定
快速地运行,且达到了预期效果。航
智能小车寻线道路设计要求是:在中间铺设了一条直径为0.5 mm的铜质漆包线,漆包线中有频率范围为20±2 kHz、电流
范围为50~150 mA的正弦波信号。随着智能小车的发展,需适应更加复杂的赛道,例如直角弯、坡道、障碍等。文中设计的
智能小车,是基于Kinetis K60单片机开发实现的,以电磁线圈作为感应传感器,采用偏差算法控制小车精准的寻线功能,从
而实现智能小车智能快速稳定的寻线行驶。
1 硬件总体设计硬件总体设计
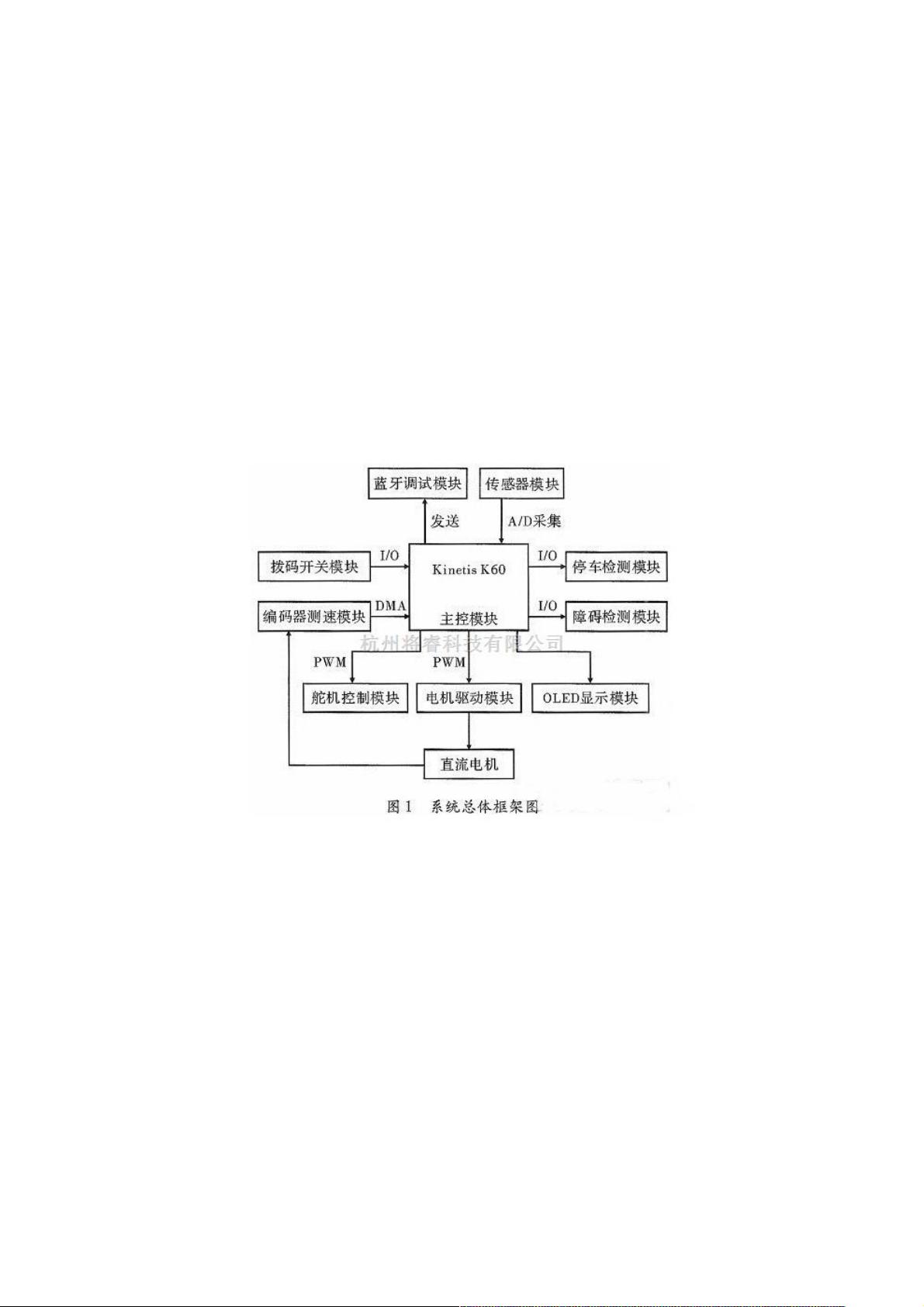
智能小车系统由Kinetis K60主控模块、传感器模块、舵机控制模块、电机驱动模块、OLED显示模块、拨码开关模块、编
码器测速模块、停车检测模块、障碍检测模块这9个部分构成。系统总体框架如图1所示。
除了以上9部分外还有电源模块,整个智能小车由7.2 V镍镉电池供电,其中由LM1117稳压芯片输出3.3 V为主控芯片
K60、拨码开关模块、停车检测模块、OLED显示模块提供电源。由一块LM2940稳压芯片得到5 V电压单独供给传感器模块,
另一块LM2940稳压芯片得到5V电压分别供给蓝牙调试模块、障碍检测模块、编码器测速模块和电机驱动模块,此外,通过试
验可发现,S3010 Futaba舵机可直接加7.2 V电压,此时舵机的响应速度也会提高,所以可直接将电池电压作为舵机的电源。
舵机控制模块和直流电机均用7.2 V电压驱动。
电磁线圈采集到的交变电压信号经双运算放大器MAX4451放大后,通过二极管的二倍压检波电路将交变的电压信号检波
形成直流信号,然后再通过单片机的A/D转换电路进行采集,获得正比于感应电压幅值的数值。
智能小车是以双电机方式工作,故采用4块BTS7971作为驱动芯片。BTS7971由一个p沟道的高边MOSFET和一个n沟道
的低边MOSFET结合一个集成的驱动IC,形成能经受大电流通过的H桥的半边。因此4个BTS7971便能进行连接构成两个H全
桥,进而实现电机的正反转。此外,使用 74HC244N三态八缓冲器隔离电机驱动模块,可防止电机转动产生的干扰信号灌入
主控芯片而致损坏。
采用常开型塑封干簧管作为检测元件。在道路的起点和终点处埋有永久磁铁,当小车经过磁铁时,干簧管闭合,进而将这
种信号传递给CPU,实现停车功能。将两个接近开关分别安装在小车两边对障碍进行检测。正常情况下,两个接近开关处于
关闭状态0。通过调整好接近开关的检测距离,当道路某一边的障碍物进入接近开关的检测范围后,接近开关一直保持导通状
态1,将这种信号的0和1变化传递到CPU,即可实现小车的障碍检测功能。
2 智能小车电磁寻线智能小车电磁寻线
2.1 传感器布置结构
采用“五横二竖加八字”排列的电磁线圈,如图2所示。此结构能使小车在直道、直角弯、S弯、十字弯,坡道上自主稳定地
寻线行驶,具有抗干扰性强、稳定性高、机械强度高等特点。在高速运行的情况下仍能保持稳定的导航功能。
下载后可阅读完整内容,剩余3页未读,立即下载
2009-08-07 上传
2021-10-16 上传
119 浏览量
2015-06-14 上传
2021-07-27 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38552292
- 粉丝: 6
- 资源: 894
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
