"基于子空间的多目标跟踪与二维方向估计研究"
79 浏览量
更新于2024-04-02
收藏 768KB PDF 举报
This paper presents a novel approach for tracking the two-dimensional direction-of-arrivals (DOAs) of multiple moving targets with crossover points on their trajectories, based on subspace techniques. The proposed method, outlined in the IEEE Transactions on Aerospace and Electronic Systems, aims to improve the accuracy and efficiency of tracking multiple targets in complex environments.
The key innovation of this approach lies in the use of subspaces to estimate and track the DOAs of multiple targets simultaneously. By decomposing the received signals into subspaces associated with individual targets, the proposed method is able to effectively separate and track the targets even in challenging scenarios where the trajectories intersect or overlap.
The paper outlines the theoretical foundation of the subspace-based approach, highlighting the advantages of using subspaces for DOA estimation and tracking. In particular, the method leverages the inherent structure of the signal subspace to improve the accuracy of DOA estimation and mitigate the effects of interference and noise.
Experimental results demonstrate the effectiveness of the proposed approach in tracking multiple targets with crossover points on their trajectories. The method achieves superior performance compared to conventional tracking algorithms, especially in scenarios with limited sensor measurements or high levels of interference.
Overall, the subspace-based two-dimensional direction estimation and tracking technique presented in the paper offer a promising solution for tracking multiple targets in complex environments. By leveraging the power of subspaces, the method enables robust and accurate tracking of targets with crossover points, advancing the state-of-the-art in target tracking technology.
IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS, VOL. XX, NO. YY, AUGUST 2014 3
k
θ
k
φ
o
0
o
90
o
180
o
90
o
180
k
θ
k
φ
o
0
o
90
o
180
o
90
o
180
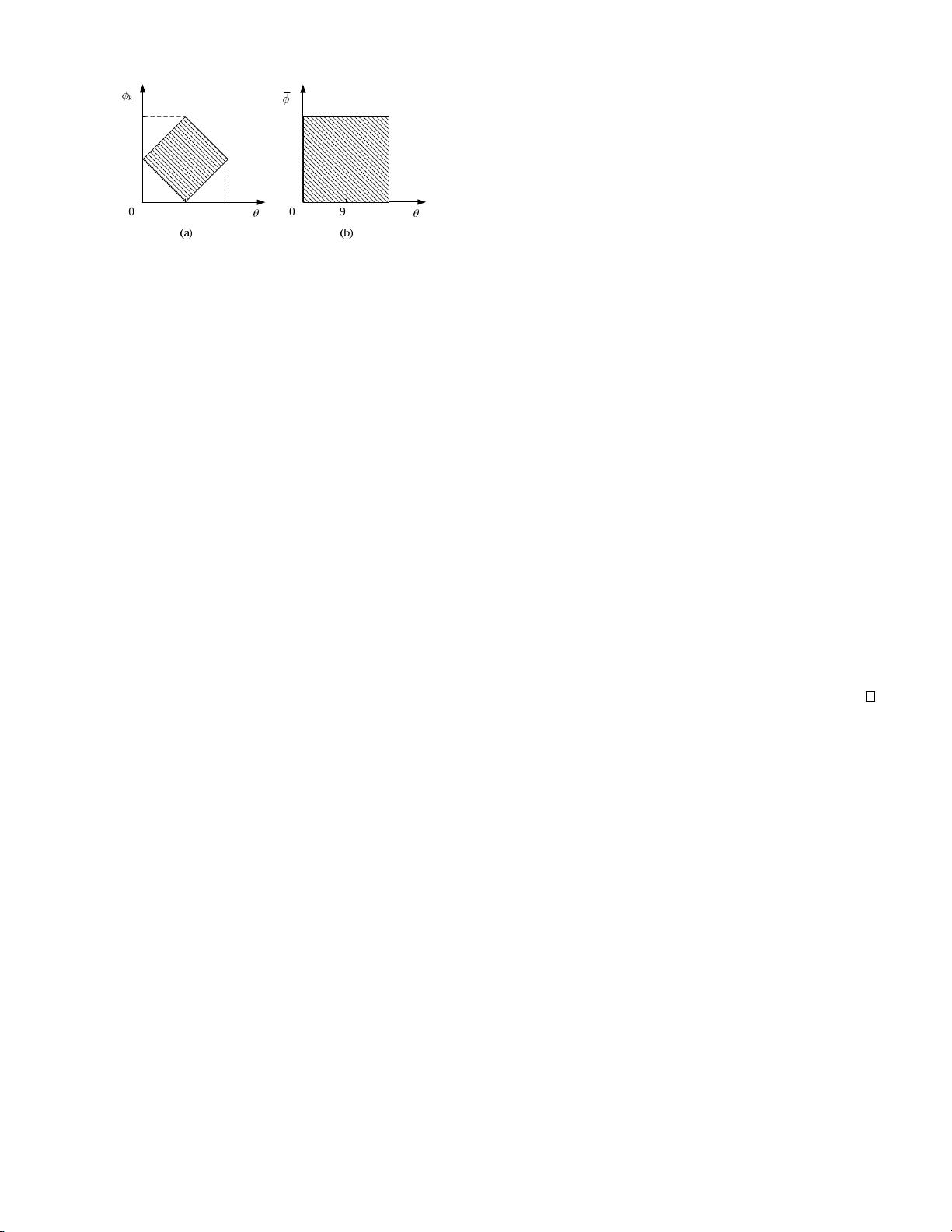
Fig. 2. The permissible regions for (a) the elevation angle θ
k
(n) and the
azimuth angle ϕ
k
(n) and (b) the elevation angle θ
k
(n) and the projected
azimuth angle
¯
ϕ
k
.
In this paper, the following basic assumptions are made on
the data model.
A1) The mathematical model of array response matrices
(i.e., A(θ) and A(ϕ)) is known, and the sensor spacing
d satisfies 0 < d ≤ λ/2 to avoid angle ambiguity.
A2) For facilitating the theoretical performance analysis,
the incident signals {s
k
(n)} are temporally complex
white Gaussian random processes with zero-mean and
the variance are given by E{s
k
(n)s
∗
k
(t)} = r
s
k
δ
n,t
and E{s
k
(n)s
k
(t)} = 0 ∀n, t for 1 ≤ k ≤ p.
A3) The additive noises {w
z
i
(n)} and {w
x
i
(n)} are tem-
porally and spatially complex white Gaussian ran-
dom processes with zero-mean and the covariance
matrices are given by E{w
z
(n)w
H
z
(t)} = E{w
x
(n)
·w
H
x
(t)} = σ
2
I
M
δ
n,t
and E{w
z
(n)w
T
z
(t)} =
E{w
x
(n)w
T
x
(t)} = O
M×M
∀n, t, and they
are statistically independent with each other, i.e.,
E{w
z
(n)w
H
x
(t)} = O
M×M
.
A4) The additive noises {w
z
i
(n)} and {w
x
i
(n)} at two
ULAs are statistically independent with the incident
signals {s
k
(n)}.
A5) The number of incident signals p is known or estimated
by number detection techniques in advance (cf. [42],
[43], and it satisfies the inequality that p < M.
From the relationship cos(ϕ
k
(n)) = cos(
¯
ϕ
k
(n)) sin(θ
k
(n))
[10], [37], we easily find the permissible region for θ
k
(n) and
ϕ
k
(n) and that for θ
k
(n) and
¯
ϕ
k
(n) as shown in Fig. 2(a)
and 2(b), respectively, while the geometry restrictions require
that the parameters θ
k
(n) and ϕ
k
(n) lie in the square region
defined by
−θ
k
(n) + 90
◦
≤ ϕ
k
(n) ≤ θ
k
(n) + 90
◦
,
for 0
◦
≤ θ
k
(n) ≤ 90
◦
θ
k
(n) − 90
◦
≤ ϕ
k
(n) ≤ −θ
k
(n) + 270
◦
,
for 90
◦
≤ θ
k
(n) ≤ 180
◦
.
(3)
The classical 1-D subspace-based direction estimation meth-
ods with eigendecomposition (e.g., MUSIC [26], estimation
of signal parameters via rational invariance techniques (ES-
PRIT) [44]) and the computationally simple 1-D subspace-
based direction estimators without eigendecomposition (e.g.,
propagator method (PM) [45], subspace-based method without
eigendecomposition (SUMWE) [39]) can be applied to each
ULA to obtain the reliable estimates of azimuth and elevation
angles separately. However, in general, there are p! possible
combinations between the estimates {
ˆ
ϕ
k
(n)} and {
ˆ
θ
i
(n)}.
Consequently the crux of 2-D direction estimation is the
pair-matching of the azimuth and elevation angles estimated
independently, which can require a tremendous computational
burden when the number of incident signals is large. Except
for the CODE [40], most of the existing techniques for pair-
matching or automatic pairing involve the computationally
extensive eigendecomposition process [5]–[8], [10], [29], [30],
[32]–[34], [36], [37]. Even though the pair-matching is accom-
plished correctly, the separate estimation of the azimuth and
elevation angles may cause the estimated angles
ˆ
θ
k
(n) and
ˆ
ϕ
k
(n) lie outside the permissible region shown in Fig. 2(a),
or equivalently we may have |cos(
ˆ
ϕ
k
(n))/sin(
ˆ
θ
k
(n))| > 1 for
sin
ˆ
θ
k
= 0, and obviously the estimate of the conventional
azimuth angle
¯
ϕ
k
(n) is unavailable with the relation
¯
ϕ
k
(n) =
arccos( cos(ϕ
k
(n))/sin(θ
k
(n)) ). Thus the estimation failure
occurs in this situation [10]. Unfortunately, the estimation
failure has not been resolved yet for the L-shaped array.
Therefore in order to overcome the aforementioned pairing
and estimation failures, we focus our attention on the joint
azimuth-elevation DOA estimation without eigendecomposi-
tion process and pair-matching procedure.
Remark 1: For decoupling the 2-D DOA estimation prob-
lem into 1-D estimation problems and fully exploiting the
well-known property of the ULA in a more straightforward
way, we parameterize the 2-D direction of the incident signals
by (θ
k
(n), ϕ
k
(n)) instead of (θ
k
(n),
¯
ϕ
k
(n)). In fact, by re-
defining the parameter θ
k
(n) as the angle of the signal s
k
(n)
with respective to the y axis, the proposed CODEC method is
also applicable to the L-shaped array placed in the x–y plane.
However in order to compare the performance of the CODEC
method with the existing methods, we still concentrate on the
problem of 2-D DOA estimation with L-shaped array placed
in the x–z plane in this paper.
III. BATCH METHOD FOR 2-D DOA E STIMATION
A. Estimation of Elevation Angles
Firstly by assuming the elevation and azimuth angles be
time-invariant, i.e., θ
k
(n) = θ
k
and ϕ
k
(n) = ϕ
k
, we can pro-
pose a new computationally efficient batch 2-D DOA estima-
tion method without eigendecomposition and pair-matching,
which is suitable for DOA tracking. Under Assumption A5, we
can divide the ULA along the z axis into two nonoverlapping
forward subarrays with p or M − p sensors, and the received
signal vector z(n) in (1) can be rewritten as
z(n) = [
¯
z
T
1
(n),
¯
z
T
2
(n)]
T
= [A
T
1
(θ), A
T
2
(θ)]
T
s(n) + [w
T
¯z
1
(n), w
T
¯z
2
(n)]
T
(4)
where
¯
z
1
(n)
△
= [z
0
(n), z
1
(n), · · · , z
p−1
(n)]
T
,
¯
z
2
(n)
△
=
[z
p
(n), z
p+1
(n), · · · , z
M−1
(n)], w
¯z
1
(n)
△
= [w
z
0
(n), w
z
1
(n),
· · · , w
z
p−1
(n)]
T
, and w
¯z
2
(n)
△
= [w
z
p
(n), w
z
p+1
(n), · · · ,
w
z
M−1
(n)]
T
, while A(θ) in (1) is divided into two sub-
matrices A
1
(θ) and A
2
(θ) with the columns given by
a
1
(θ
k
)
△
= [1, e
jα
k
, · · · , e
j(p−1)α
k
]
T
and a
2
(θ
k
)
△
= [ e
jpα
k
,
e
j(p+1)α
k
, · · · , e
j(M−1)α
k
]
T
. Then under the assumptions of
data model, from (1), (2) and (4), we easily obtain the cross-
correlation matrix R
zx
between the received signals of two
剩余15页未读,继续阅读
2023-02-23 上传
2021-09-18 上传
2021-03-16 上传
2024-10-27 上传
2023-07-05 上传
2023-05-14 上传
2024-04-14 上传
2024-10-26 上传
2024-09-12 上传

weixin_38665668
- 粉丝: 4
- 资源: 940
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
