舵机工作原理与应用详解
需积分: 0 117 浏览量
更新于2024-09-16
收藏 448KB PDF 举报
"舵机知识总汇"
舵机是机器人领域中不可或缺的组件,尤其在教育和初学者入门阶段,它们的简单操作和精准定位能力使其成为理想的选件。舵机实际上是一种微型伺服马达,最初在模型制作中广泛应用,主要负责控制模型的舵面运动。在现代机器人技术中,舵机因其能够精确地转动到指定角度的功能,被广泛应用于关节型机器人的各个关节,尤其是仿人型机器人。
舵机的构造包含多个关键部分:外壳、减速齿轮组、电机、电位器和控制电路。外壳通常由塑料制成,但高端型号可能采用金属材料,以增强散热性能和结构稳定性。齿轮组则有塑料、混合或金属材质之分,每种材质对应不同的扭矩输出、成本和噪音等级。电位器作为角度传感器,实时反馈输出轴的位置,使控制电路能精确调整电机转动以保持或达到目标角度。
控制电路是舵机的“大脑”,它接收并解析外部指令,驱动电机工作。电机通过减速齿轮组将速度降低并扭矩放大,输出轴随之转动。齿轮组的设计至关重要,因为它直接影响舵机的扭矩、速度和耐用性。金属齿轮提供更强的耐用性,但成本较高且噪音较大;塑料齿轮则相反,成本低且噪音小,但耐久性较差。
舵机的工作原理可以概括为闭环控制。控制电路持续监测电位器的反馈,以确保输出轴始终处于期望的角度。这一特性使得舵机在机器人关节中尤为适用,因为它们需要在特定位置保持稳定,或者根据指令灵活转动。
在选择舵机时,需要考虑扭矩、速度、体积和精度等因素。例如,Futaba 3003和辉盛的9g微舵适合低扭矩应用,而辉盛的995舵机则能在相同体积下提供更大的扭矩。更高级的品牌如Hitec甚至使用钛合金齿轮来实现极致的扭矩和耐用性。
舵机是机器人技术中的基本元件,它们的正确理解和使用对于初学者和专业人士来说都是至关重要的。了解舵机的工作原理、结构特点以及如何根据需求选择合适的舵机,将有助于提升机器人设计和构建的效率与精度。
舵机基础知识
最近几年国内机器人开始起步发展,很多高校、中小学都开始进行机器人技术教学。小
型的机器人、模块化的机器人、组件式的机器人是教学机器人的首选。在这些机器人产品中,
舵机是最关键,使用最多的部件。
根据控制方式,舵机应该称为微型伺服马达。早期在模型上使用最多,主要用于控制模
型的舵面,所以俗称舵机。舵机接受一个简单的控制指令就可以自动转动到一个比较精确的
角度,所以非常适合在关节型机器人产品使用。仿人型机器人就是舵机运用的最高境界。
一、 舵机的结构
舵机简单的说就是集成了直流电机、电机控制器和减速器等,并封装在一个便于安装的
外壳里的伺服单元。能够利用简单的输入信号比较精确的转动给定角度的电机系统。
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器
的信息能比较精确的控制和保持输出轴的角度。这样的直流电机控制方式叫闭环控制,所以
舵机更准确的说是伺服马达,英文 servo。
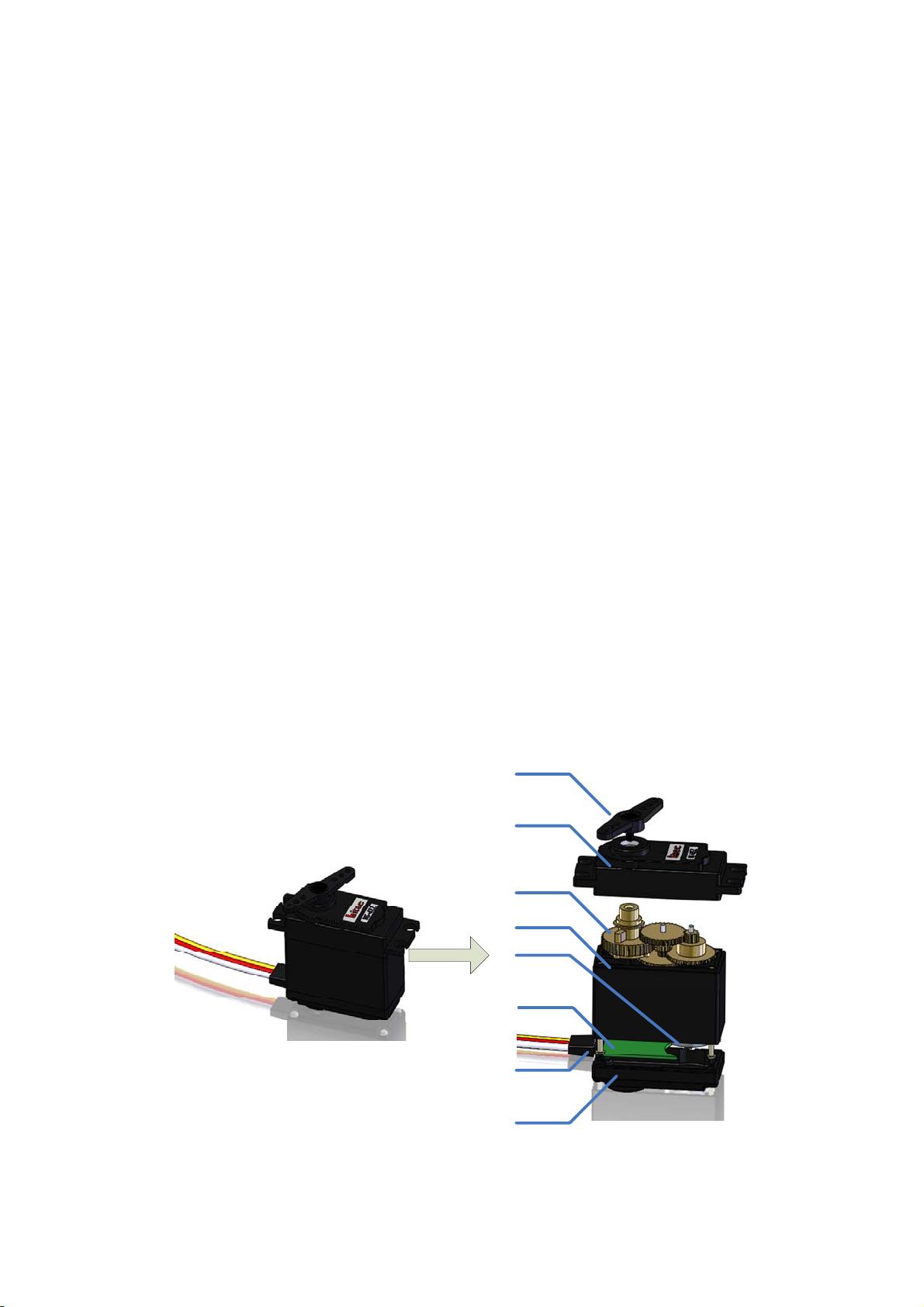
舵机的主体结构如下图所示,主要有几个部分:外壳、减速齿轮组、电机、电位器、控
制电路。简单的工作原理是控制电路接收信号源的控制信号,并驱动电机转动;齿轮组将电
机的速度成大倍数缩小,并将电机的输出扭矩放大响应倍数,然后输出;电位器和齿轮组的
末级一起转动,测量舵机轴转动角度;电路板检测并根据电位器判断舵机转动角度,然后控
制舵机转动到目标角度或保持在目标角度。
舵盘
上壳
齿轮组
中壳
控制电路
下壳
控制线
电机
图一 舵机的结构
下载后可阅读完整内容,剩余7页未读,立即下载
2011-05-04 上传
2021-01-13 上传
2013-07-27 上传
点击了解资源详情
2021-09-29 上传
2012-06-05 上传
2012-01-07 上传

ljsmuye1
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
