
Figure 1. Ship domain model
下载: 全尺寸图片 幻灯片
椭圆船舶领域边界方程为
(xb)2+(ya)2=1(xb)2+(ya)2=1
(4)
圆形船舶领域边界方程为
x2+y2=Rx2+y2=R
(5)
2.2 PCR 判断数值模型
定义“潜在碰撞危险(potential collision risk,PCR)”为若 2 船在初始状态下航行速度
矢量不变,不论目前相距多远,他船最终都将驶入本船船舶领域,则 2 船存在潜在碰撞危
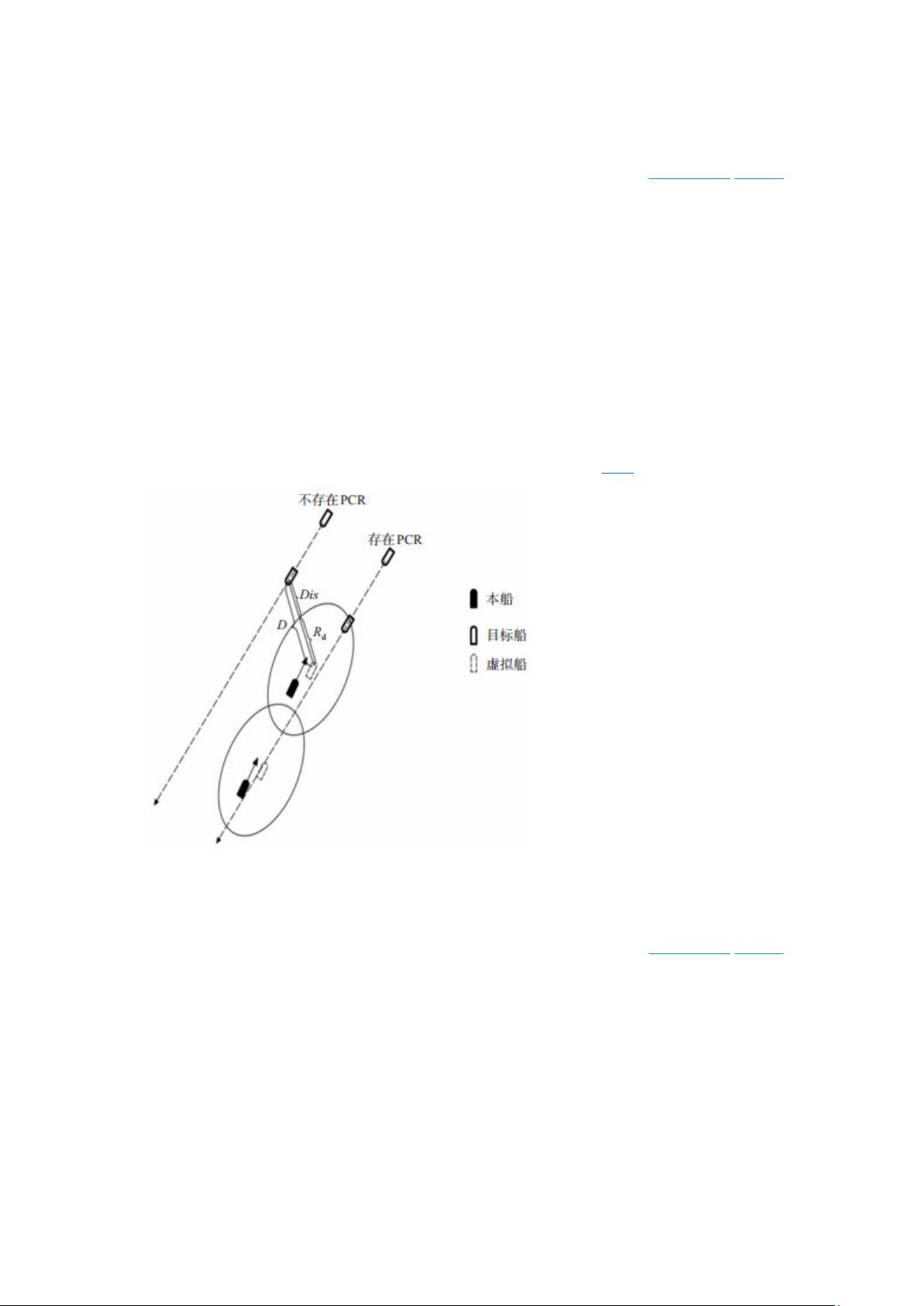
险。构成对遇态势的 2 船包括存在、不存在 PCR 这 2 种情形,见图 2。
图 2 对遇局面潜在碰撞危险
Figure 2. PCR of head-on situation
下载: 全尺寸图片 幻灯片
图中目标船和虚拟船(船舶领域中心)距离为 D,沿虚拟船方向到领域边界的距离为
Dis。式(6)为任意时刻 t 目标船沿虚拟船方向到领域边界的距离。
⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪Dis(t)=(X(t)′O−X(t)T)2+(Y(t)′O−Y(t)T)2−−−−−−−−−−−−−−−−−−−−−−−−−−√−R(t)dR(t)d=ab/(asinQ(t))2+(bcosQ(t))2−−−−−−−−−−−−−−−−−−−−−√(X(t)′O,Y(t)′O)=(X(t)O,Y(t)O)+(sin(CO+19∘),cos(CO+19∘))Rd/4(X(t)T,Y(t)T)=(X(0)T,Y(0)T)+(sinCT,cosCT)vTt{Dis(t)=(XO(t)′−XT(t))2+(YO(t)′−YT(t))2−Rd(t)Rd(t)=ab/(asin
Q(t))2+(bcosQ(t))2(XO(t)′,YO(t)′)=(XO(t),YO(t))+(sin(CO+19∘),cos(CO+19∘))Rd/4(XT(t),YT(t))=(XT(0),YT(0))+(sinCT,cosCT)vTt
(6)
式中:t 为时刻,数值计算时可用 t=K×Δt,其中 K∈N,Δt 为时间步长;O 和 T 分别
为本船和目标船。v 为航速,m/s; C 为航向,(°);大地坐标系中(X
O
, Y
O
) 为本船位置;
(X'
O
, Y'
O
) 为虚拟船位置;(X
T
, Y
T
) 为目标船位置;Q 为他船相对本船舷角,(°)。若存在
剩余17页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4373
- 资源: 1万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
展开
我的内容管理
展开







最新资源
- JSP+SSM科研管理系统响应式网站设计案例
- 推荐一款超级好用的嵌入式串口调试工具
- PHP域名多维查询平台:高效精准的域名搜索工具
- Citypersons目标检测数据集:Yolo格式下载指南
- 掌握MySQL面试必备:程序员面试题解析集锦
- C++软件开发培训:核心技术资料深度解读
- SmartSoftHelp二维码工具:生成与解析条形码
- Android Spinner控件自定义字体大小的方法
- Ubuntu Server on Orangepi3 LTS 官方镜像发布
- CP2102 USB驱动程序的安装与更新指南
- ST-link固件升级指南:轻松更新程序步骤
- Java实现的质量管理系统Demo功能分析与操作
- Everything高效文件搜索工具:快速精确定位文件
- 基于B/S架构的酒店预订系统开发实践
- RF_Setting(E22-E90(SL)) V1.0中性版功能解析
- 高效转换M3U8到MP4:免费下载工具发布
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


