Faster R-CNN后精确缺陷分割:弱边缘处理与工件检测提升
117 浏览量
更新于2024-08-31
1
收藏 495KB PDF 举报
本研究主要关注的是Faster R-CNN定位后在工业CT图像中的缺陷分割问题。Faster R-CNN作为一种强大的目标检测模型,因其在图像检测领域的广泛应用而备受瞩目。然而,它在定位缺陷区域时,由于目标边缘通常较为模糊,特别是对于像裂纹、气泡和夹渣这样的小缺陷,边缘强度较弱,这可能导致常规分割算法如直接应用阈值法产生过分割或欠分割的现象。
为解决这一问题,研究者提出了一种针对Faster R-CNN定位后缺陷区域的精确阈值分割策略。首先,通过形态学开闭重建算法对定位区域进行处理,增强边缘的清晰度。接着,对重建后的图像采用Otsu双阈值法进行变换,这种方法可以根据图像的灰度分布自动找到最优的二值化阈值,以减少人为干预的需求。
进一步,研究人员引入了最大熵阈值分割法,这是一种基于信息熵的分割方法,旨在最大化图像的信息熵,从而达到最佳的分割效果。最大熵阈值法可以更有效地处理弱边缘和噪声,提高分割的准确性。
最后,通过对分割出的缺陷进行面积和周长等参数的测量,评估新算法的有效性。实验结果显示,与传统分割算法相比,这种结合形态学和Otsu/最大熵阈值法的策略在处理Faster R-CNN定位的工业CT图像缺陷时,能够提供更精确的分割,不仅能够准确地识别出包含弱边缘的目标,还能有效去除轮廓背景对分割的干扰,从而提高了缺陷检测的精度和可靠性。
这项研究不仅提升了在工业CT图像中对缺陷的检测能力,而且展示了将深度学习与传统的图像处理技术融合的优势,为工业缺陷检测领域的实际应用提供了新的思路和方法。
Faster R-CNN定位后的工业定位后的工业CT图像缺陷分割算法研究图像缺陷分割算法研究
由Faster R-CNN定位的缺陷区域内存在弱边缘,若直接采用常规分割算法对该小区域进行处理,会出现严重的
过分割或欠分割现象。在此研究了一种针对Faster R-CNN定位后的工件缺陷的精确阈值分割法。在利用形态学
开闭重建算法对定位区域进行重建,并对重建后的图像用Otsu双阈值法做变换处理的基础上,进一步利用最大
熵阈值分割法对变换后的图像进行分割,最终对分割出的缺陷进行面积、周长等参数的测量。实验结果表明,
所研究算法较常规的算法对工件的缺陷(裂纹、气泡和夹渣)有更好的分割能力。该算法不仅可以准确地分割
出包含弱边缘的目标,还可以有效排除轮廓背景对分割的干扰。
0 引言引言
深度学习的兴起带动了卷积神经网络(CNN)的发展,如今一系列的CNN改进网络如雨后春笋般地出现,如当前兴盛的Faster
R-CNN网络被广泛地应用于图像检测领域。Faster R-CNN用于目标定位时,定位出的区域内往往会出现目标边缘较为模糊的
情况,其目标不是理想的阶跃型边缘,而是弱边缘
[1]
。对于工件来说,缺陷只占图像很小的比例,尤其是气泡和夹渣,邻域间
的灰度差异也不明显。针对这种情况,必须采用恰当的算法才能实现工件的精确分割。
阈值法因简单而被大量应用在图像分割领域。其中,应用最广泛的有最大熵阈值法和Otsu阈值法。
Pun最早将信息熵定义引用到图像分割领域,随后Kapur等提出了最大香农信息熵阈值法
[2]
。文献[3]采用了最大熵阈值法及
其改进算法进行图像的分割。
Otsu阈值法由于高效而被视为最佳的阈值选取法。如文献[4]采用了二维直方图Otsu法;文献[5]提出了三维直方图重建的
Otsu阈值法。
近些年来,边缘检测法(如数学形态学)被广泛地应用于图像分割领域。文献[6]将数学形态学与Otsu分割算法结合,取得了比
直接分割方法更好的效果。
因此,本文结合文献[6]的思想,提出了将形态学和上述两类阈值法相结合的方法。实验结果证明了本文算法对工件缺陷的
弱边缘和小目标都能准确地分割出来,较直接分割法有更佳的效果。
1 图像分割理论的概述图像分割理论的概述
1.1 形态学重建形态学重建
图像形态学是在数学形态学的基础上发展而来的非线性图像处理方法,通过具有一定形态的结构元素对图像进行“探测”,从
而得到物体更本质的形态,便于对图像进行分析和识别
[7]
。
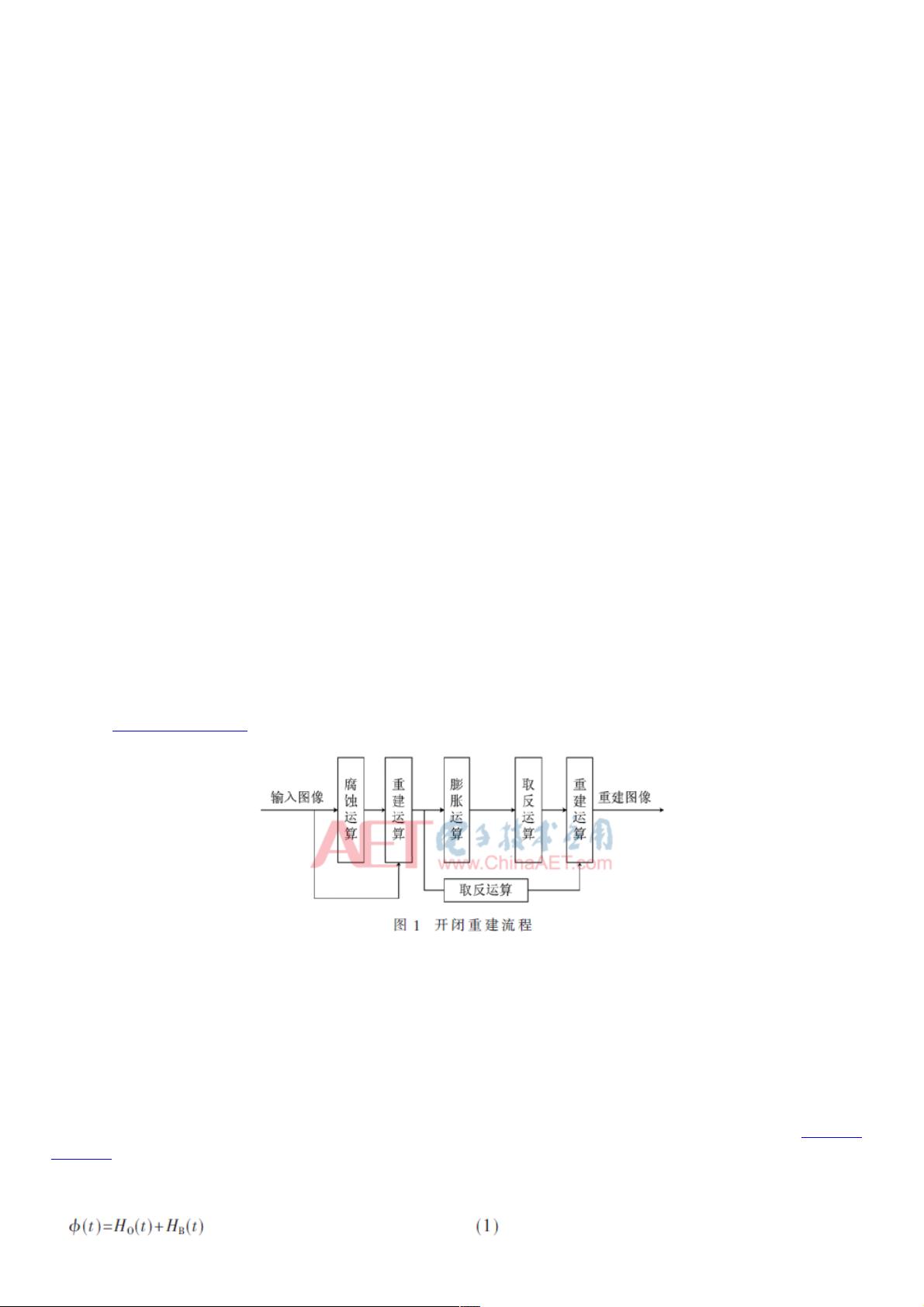
本文将形态学开闭重建算法用于图像滤波,其重建的流程如图1所示。
1.2 Otsu阈值分割阈值分割
Otsu阈值法又叫最大类间差分法
[8]
,该算法假设一幅图像由前景和背景组成,通过统计学的方法选取一个阈值,运用该阈
值使得图像的前景和背景尽可能地分开。设一幅图像的灰度值是1~L,阈值t从1~L变化,其中使类间方差达到最大的t
*
为最
佳阈值。
当目标相对背景尺寸较小时,或图像中有多余两类目标时,可以推广为多个阈值的选取,从而实现图像的多阈值分割。
1.3 最大熵阈值分割最大熵阈值分割
根据灰度级别,用阈值t把图像划分为背景和目标两类,求使背景熵与目标熵之和达到最大的最优阈值的方法就是最大熵阈
值分割法
[8]
。
设目标熵和背景熵分别为H
O
(t)和H
B
(t),则熵函数定义为:
下载后可阅读完整内容,剩余6页未读,立即下载
223 浏览量
点击了解资源详情
152 浏览量
点击了解资源详情
点击了解资源详情
198 浏览量
点击了解资源详情
点击了解资源详情

weixin_38629449
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
