服务机器人视觉系统:CPLD在软硬件设计中的应用
85 浏览量
更新于2024-09-01
收藏 259KB PDF 举报
"该文探讨了基于CPLD(复杂可编程逻辑器件)的服务机器人视觉系统的软硬件设计,强调了视觉系统在图像采集、实时反应和目标跟踪方面的关键要求。文章介绍了采用CMOS图像传感器OV7635替代CCD进行图像采集,利用DSP处理器TMS320VC5509A进行图像处理和系统控制,并通过TFT液晶显示器展示识别和跟踪效果。软件方面,借鉴了足球机器人的视觉技术,结合全局特征矩构建的雅可比矩阵实现目标自适应跟踪。硬件设计包括图像采集、信号处理和控制系统等模块,其中CPLD扮演了重要角色,提高了系统的灵活性和效率。"
本文深入研究了服务机器人视觉系统的设计,这个系统对于图像的精确获取、实时响应和动态目标追踪有着严格的需求。随着自动化技术和计算机科学的进步,机器人视觉系统已经成为智能机器人系统不可或缺的一部分,特别是在服务机器人领域。视觉系统涵盖了图像处理、模式识别和视觉跟踪等多个技术领域,根据机器人的应用场景,其设计也会有所差异。
在硬件设计中,文章提出使用CMOS图像传感器而非传统的CCD,原因是CMOS传感器拥有更低的功耗、内置的放大器和A/D转换器,可以提供数字信号输出。采用Omnivision公司的OV7635传感器,其640x480的分辨率足以满足大多数服务机器人的需求。图像采集后的数据通过DSP(数字信号处理器)TMS320VC5509A进行处理,该芯片性能强大,适合高速图像分析。此外,为了实时显示系统运行状态,设计中还整合了TFT液晶显示器。
软件部分,文章借鉴了足球机器人视觉技术,优化了目标识别速度,同时通过计算全局特征矩构建的雅可比矩阵,实现了对目标的自适应跟踪,增强了系统的动态适应能力。CPLD在这里起到了关键作用,它提供了灵活的逻辑配置,可以快速适应不同的任务需求。
基于CPLD的服务机器人视觉系统软硬件设计综合考虑了效率、实时性和灵活性,通过优化硬件组件和采用先进的算法,提升了服务机器人的视觉感知和目标追踪能力,为实际应用提供了可靠的技术基础。
基于基于CPLD的服务机器人视觉系统软硬件设计的服务机器人视觉系统软硬件设计
视觉系统是一个非常复杂的系统,它既要做到图像的准确采集还要做到对外界变化反应的实时性,同时还需要
对外界运动的目标实时跟踪。
随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在工厂、生活当中,机器人视觉系统作为智能
机器人系统中一个重要的子系统,也越来越受到人们的重视。它涉及了图像处理、模式识别和视觉跟踪等领域。不同种类的机
器人由于工作的重点不一样,它的视觉系统在软件或硬件上都有着细微的差别。本文研究基于服务机器人的单目视觉系统。它
处理的是二维图像,是基于对无遮挡物体颜色和形状的识别以及3D目标物体的平动跟踪。
视觉系统是一个非常复杂的系统,它既要做到图像的准确采集还要做到对外界变化反应的实时性,同时还需要对外界运动的目
标实时跟踪。因此,视觉系统对硬件和软件系统都提出了较高的要求。目前比较流行的足球机器人技术,它的视觉系统属于比
较典型的快速识别和反应类型。一般情况下,它是通过彩色标志定标的方法来达到对队员和目标的识别,以及通过扩展卡尔曼
滤波器的预测功能来实现对目标的跟踪功能。在硬件上,采用一个现成的摄像机来实现一个机器人的图像采集系统。
本系统在设计上采用CMOS图像传感器代替CCD类型传感器进行采集图像,DSP处理芯片 TMS320VC5509A进行图像处理以
及作为CPU控制,在设计过程中,为了直观显现机器人视觉系统识别和跟踪的效果,专门采用了一个TFT格式的液晶来直观显
示。软件上,采用了一部分足球机器人的视觉技术来达到对目标的快速识别,通过全局的特征矩构建的雅可比矩阵达到对目标
的自适应跟踪。
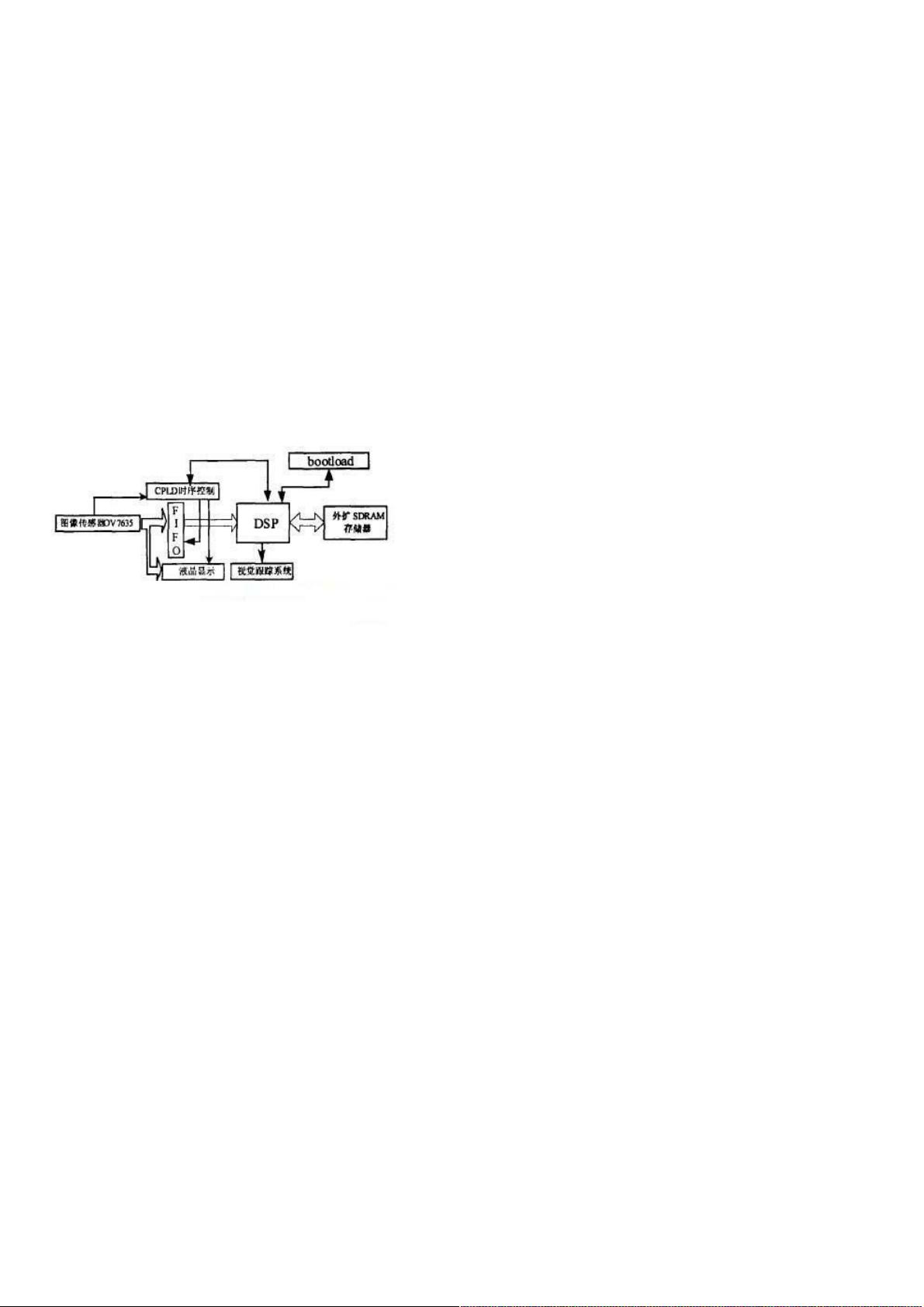
1 硬件部分设计
图1为系统硬件电路的功能模块框图。
1.1 图像采集
视觉镜头把外部的图像信息成像在图像传感器的面阵单元上。目前流行的图像传感器有面阵CCD(Charged Coupled
Device,电荷耦合器件)型和面阵CMOS两种。相比较CCD型的图像传感器,CMOS图像传感器的有源像素单元为每一个像
素提供了放大器,只需一个单供电低逻辑电平电压,功耗只相当于CCD的十分之一。CMOS图像传感器内部集成了A/D转换部
分,直接输出数字信号。基于这些因素,本系统采用了Omnivision公司推出的 CMOS彩色图像传感器OV7635.
OV7635的分辨力为640X480,能输出3种格式的8位数据:YCbCr4:2:2模式、 RGB4:2:2模式和RGB原始数据模式。输出
VGA格式最大可达到30fps(fps:每秒帧数)。能工作在逐行扫描下和隔行扫描下。OV7635有主模式和从模式两种工作模
式。在主模式下,同步信号和时钟不由外围设备控制。在从模式下,OV7635的场同步信号VSYNC,行同步信号HREF以及系
统的晶振频率XCLK均由外部设备控制。本系统采用的是主模式。OV7635通过I2C总线配置片内寄存器,使其输出原始数据。
系统上电复位后,由DSP芯片的 I2C总线信号对CMOS寄存器初始化。然后OV7635就按要求输出图像信号。包括行同步信号
HREF,场同步信号VSYNC,像素时钟信号PCLK, 数字图像信号。
1.2 液晶显示
为了很直观的看到视觉系统对人的识别和跟踪效果,采用了一片INNOLUX公司的PT035TN01液晶显示屏。为了不增加对DSP
的负担,同时也为了实时看到对外界目标物体的跟踪效果,液晶显示的数据不经由DSP,直接通过传感器OV7635输出的图像
数据信号和 CPLD控制时序来进行显示。PT035TN01是3.5英寸TFT格式的液晶,分辨力为320×3(RGB)×240,液晶IF1、
IF2两输入控制脚对输入的数据格式进行选择:串行RGB格式、CCIR601格式、CCIR656格式。液晶的扫描模式有4种。本视
觉系统采用的输入数据格式是 CCIR601格式,扫描模式为由上到下和左到右的扫描模式。
在CCIR601格式下,图像传感器输出的像素时钟PCLK通过CPLD二分频作为液晶的工作时钟,图像传感器输出的行同步信号
HREF经过CPLD的处理后作为液晶的行同步信号HIS,这样,在CPLD控制下,图像传感器OV7635输出的数据信号送入液晶
中进行显示。
1.3 时序控制
OV7635输出的场同步信号VSYNC,行同步信号HREF以及像素时钟信号PCLK接至CPLD芯片,产生控制信号把OV7635输出
的数据信号存入FIFO帧存储器AL422B中,以及产生液晶的时钟和行同步信号控制液晶的显示。CPLD采用了ALTERA公司的
EPM7064芯片。在CPLD中完成了对FIFO的写控制、通知DSP读信号、液晶的时钟信号的产生等功能。
CPLD接收场同步信号VSYNC,此信号的下降沿表示图像传感器输出一帧的开始,此时CPLD产生WRST负脉冲复位FIFO的写
指针。场同步信号VSYNC下降沿后,判断行同步信号HREF的上升沿到来,接着利用像素时钟信号PCLK作为写时钟 WCK将
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-18 上传
148 浏览量
2020-08-05 上传
148 浏览量
点击了解资源详情
127 浏览量
101 浏览量
149 浏览量
点击了解资源详情

weixin_38702339
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi+SQL2000实现的商品进销存管理系统设计
- XP系统加速秘籍:高效优化提升启动速度
- 使用StarUML创建UML类图教程
- 优化Oracle SQL:高效编程与暗示技巧
- Java2权威指南:深入解析与应用实践
- C++自学考试讲义:PPT版核心要点解析
- STC89C51RC电脑时钟实现整点报时与音乐闹钟功能
- SVG教程:掌握可伸缩向量图形
- 精通OpenCV:计算机视觉应用指南
- 2008年10月自学考试C++程序设计试题解析
- VB6.0学生档案管理系统:信息化提升学校管理效能
- ASP.NET日历控件集成日志功能
- MySQL 5.0 存储过程详解:新特性和实践指南
- U-EC5调试适配器使用教程 for C8051F系列
- 24位高精度ADC ADS1258:特性、应用与SPI接口设计
- C++指针详解:用法、原则与复杂类型剖析
