摄象机模型与透视投影:针孔模型与外极线几何解析
需积分: 0 58 浏览量
更新于2024-07-01
收藏 153KB PDF 举报
"这篇文档详细介绍了摄影机模型和外极线几何的相关知识,主要涵盖了针孔模型、透视投影、摄象机内外参数、线性近似投影以及外极线几何等多个方面。"
在计算机图形学中,针孔摄象机模型是一种常用的模拟真实相机的方法。在第五章中,模型被通过矢量代数的方式介绍,而在本附录B中,作者使用坐标变换的方法进一步探讨。首先,摄象机坐标系被定义,其原点位于焦心,X、Y、Z轴分别由光轴方向A和两个正交方向H'、V'确定,形成右手直角坐标系。
透视投影是针孔模型的基础,它描述了三维世界中的点如何在二维图像平面上呈现。当三维点Mc(Xc,Yc,Zc)T通过透视投影到图像平面上,其坐标变为(u,v)T。这个过程由焦距f决定,公式表示为:u = f * Xc / Zc 和 v = f * Yc / Zc。焦平面是与光轴平行且过焦心的平面,实际图像通常位于这个平面之后,为了简化计算,会使用一个虚拟图像平面,它与实际图像平面关于焦心对称,且坐标系保持一致。
摄象机的外参数描述了摄象机在世界坐标系中的位置和朝向,包括旋转和平移,这些参数对于理解物体在图像中的相对位置至关重要。内参数则涉及到相机的光学特性,如焦距、主点位置以及畸变系数等,这些参数用于将摄象机坐标系的点转换为归一化的图像坐标。
在透视投影的线性近似部分,文档提到了正投影、弱透视、平行透视和仿射摄象机四种类型,它们分别对应于不同级别的透视效果,从完全忽略深度信息的正投影到考虑透视但忽略比例变化的弱透视等。
外极线几何是描述两个摄象机之间的相对位置和方向的重要理论。外极线是一条特殊直线,所有从一个摄象机看到的物体点,其在另一个摄象机中对应的像点都将位于这条线上。在外极线几何中,基础矩阵是关键,它可以用来描述两个摄象机间的几何关系,并进行外极几何变换。
这篇文档详细阐述了摄影机模型的数学基础,包括从三维到二维的投影过程、各种投影类型的线性近似,以及双摄象机系统中的外极线几何原理,这些都是计算机视觉和图形学领域中的核心概念。
227
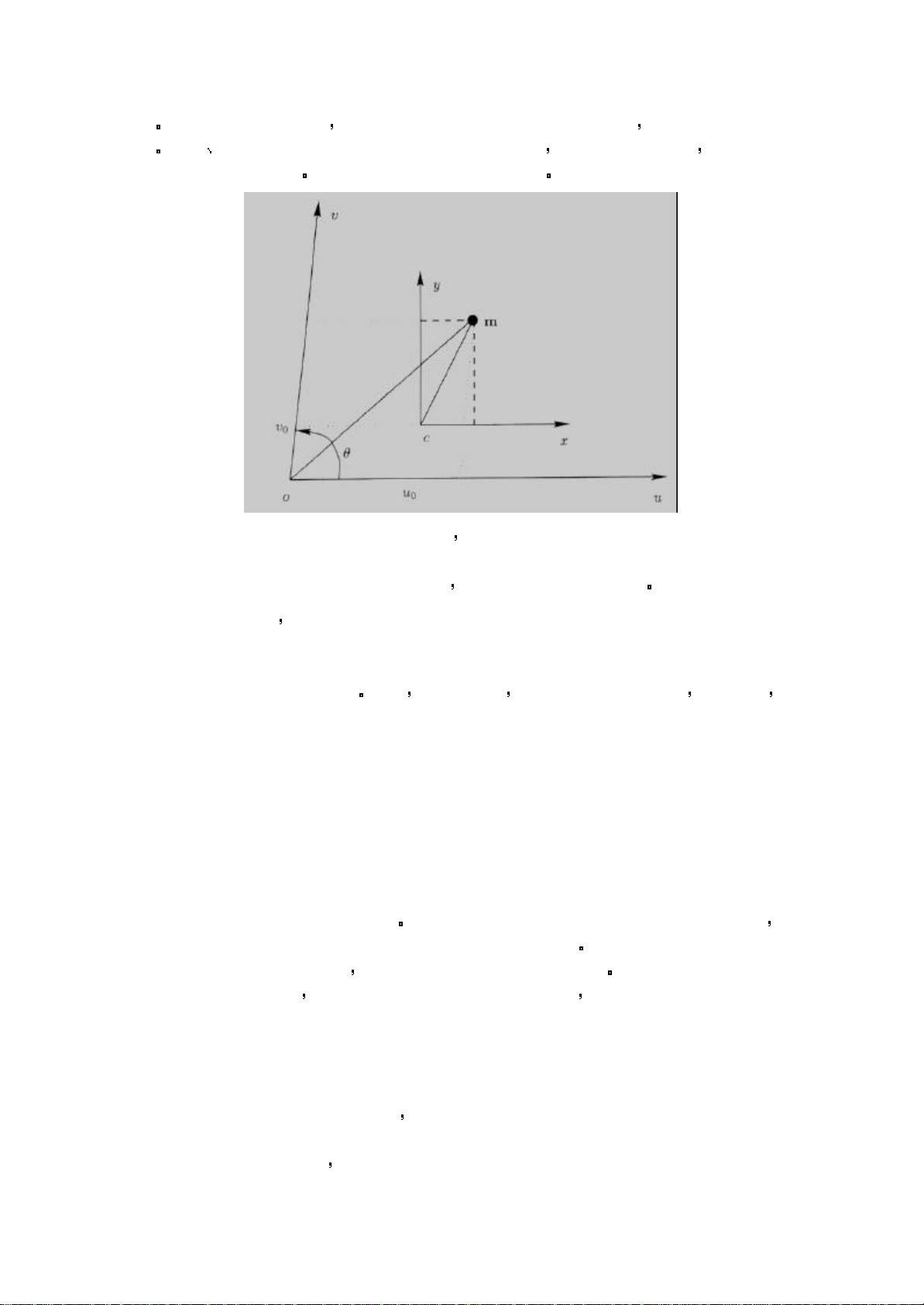
同 (o,u,v)则是像素坐标系 其原点常位于图象的左上角而不是主点 c 像素也常常不是方
的 设 k
u
k
v
是 u,v 轴上的单位在图象坐标系中的度量值 θ是 u,v 两轴的夹角 (u
0
,v
0
)是 c
在像素坐标系中的坐标 这五个参数就是摄象机的内参数
图 B.3 摄象机的内参数 图象平面上的坐标变换
令 m
old
=[x,y]
T
为图象坐标系中的坐标值 m
new
=[u,v]
T
则是像素坐标 显然有
oldnew
Hmm
~
~
=
其中
=
100
sin/0
cot
0
0
vk
ukk
H
v
uu
θ
θ
另外 根据(B.3)式 我们有
c
Mm
~
~
oldold
Ps = 代入上式
得
cnewcoldnew
PHPs MMm
~
~
~
==
其中
=
==
0100
0sin/0
0cot
0100
000
000
0
0
vfk
ufkfk
f
f
HHPP
v
uu
oldnew
θ
θ
(B.7)
P
new
即像素坐标表示的投影矩阵 从中我们可以看到真正起作用的是α
u
=fk
u
和α
v
=fk
v
即焦距的变化和像素尺度的变化在最终的图象上是不可区分的
在实际应用中为简化公式 我们常常使用所谓的归一化坐标系 该坐标系也是定义在图
象平面上的二维坐标系 如果用该坐标系表示图象平面上的点 则投影矩阵 P
N
有非常简单
的形式
=
0100
0010
0001
N
P
(B.8)
对摄象机坐标系中的点(X
c
,Y
c
,Z
c
) 其像点的归一化坐标(x
N
,y
N
)满足
x
N
=X
c
/Z
c
, y
N
=Y
c
/Z
c
(B.9)
根据 P
N
和 P
new
的定义 我们可以看到 P
N
和 P
new
满足
剩余16页未读,继续阅读
168 浏览量
2013-08-26 上传
2021-10-30 上传
2021-10-30 上传
2021-09-20 上传
2023-04-19 上传

白绍伟
- 粉丝: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
