POP-HMI与ECOSTEP伺服驱动器通信详解及参数设置
52 浏览量
更新于2024-08-26
收藏 881KB PDF 举报
POP与ECOSTEP伺服驱动器通信说明是一份技术文档,详细阐述了POP-HMI与ECOSTEP伺服驱动器之间的通信方法。POP-HMI采用专有的ECOSTEP数据通讯协议进行交互,支持RS232和RS485两种常见的串行通信接口。在默认配置下,设备类型被设置为ECOSTEP伺服驱动器,通信参数包括波特率9600,数据位8位,1位停止位,无校验方式,设备站号为1。
在实际操作中,单台POP-HMI设备可以访问伺服驱动器的寄存器,包括8位、16位和32位数据类型。这些寄存器的操作范围从0到最大值,如8位数据的范围为0.00~FFFFFF(1.07倍精度),而32位数据则涉及更精确的设置,如设定或显示转速时,Index和SubIndex共同确定内部地址,例如"60FF00"代表特定的转速控制。
对于转速等数值,需要通过指数归一化处理才能正确设置。例如,为了设定32位无符号整数转速,需要将原始值乘以2^32然后除以一个转换因子(64*8000),得到归一化的数值“503316”。如果使用有符号整数,转换因子会相应调整。用户在JB_HMI软件中通过选择适当的寄存器类型和“设定”选项来实现这些操作,同时可能需要启用“归一化”选项。
文档还提供了多个示例图(图1、图2和图3),这些图表帮助用户理解地址设定和数值转换的过程。上海博深电子有限公司作为技术支持方,提供了这份详细的指南,确保了用户能够有效地与ECOSTEP伺服驱动器进行高效、准确的通信。这份文档对于安装、调试和维护基于ECOSTEP协议的伺服系统至关重要。
POP-HMI 与 ECOSTEP 伺服驱动器通信说明
POP-HMI 采用 ECOSTEP 数据通讯协议,与 ECOSTEP 伺服驱动器进行通讯,可支持 RS232
或 RS485 两种通信口连接。
JB-HMI 软件默认设置:
设备类型 ECOSTEP 伺服驱动器
通信口类型 RS232
波特率 9600
数据位 8
停止位 1
校验方式 无
设备站号 1
连接方式 单台设备
可读写寄存器范围:
寄存器类型 可操作范围 格式 说明
8Bits 0~FFFFFF
1
HHHHHH
1
8位数据
16Bits 0~FFFFFF
1
HHHHHH
1
16位数据
32Bits 0~FFFFFF
1
HHHHHH
1
32位数据
8Bits 0.00~FFFFFF
1
.07
2
HHHHHH
1
.HH
2
8位数据中的某一位
16Bits 0.00~FFFFFF
1
.0F
3
HHHHHH
1
.HH
3
16位数据的某一位
32Bits 0.00~FFFFFF
1
.1F
4
HHHHHH
1
.HH
4
32位数据的某一位
注:H 表示十六进制,范围为 0-F。
注 1:ECOSTEP 伺服驱动器中的数据地址由 Index 和 SubIndex 组成,其中 Index 的取值范
围式是 0~0xFFFF(十六进制),SubIndex 的取值范围式是 0~0xFF(十六进制)。在 JB_HMI
软件中将 Index 和 SubIndex 地址合并后输入,前 4 位是 Index,后 2 位是 SubIndex。例如,
若需要设定或显示转速,对应的 ECOSTEP 伺服驱动器内部单元 Index 是 0x60FF,SubIndex
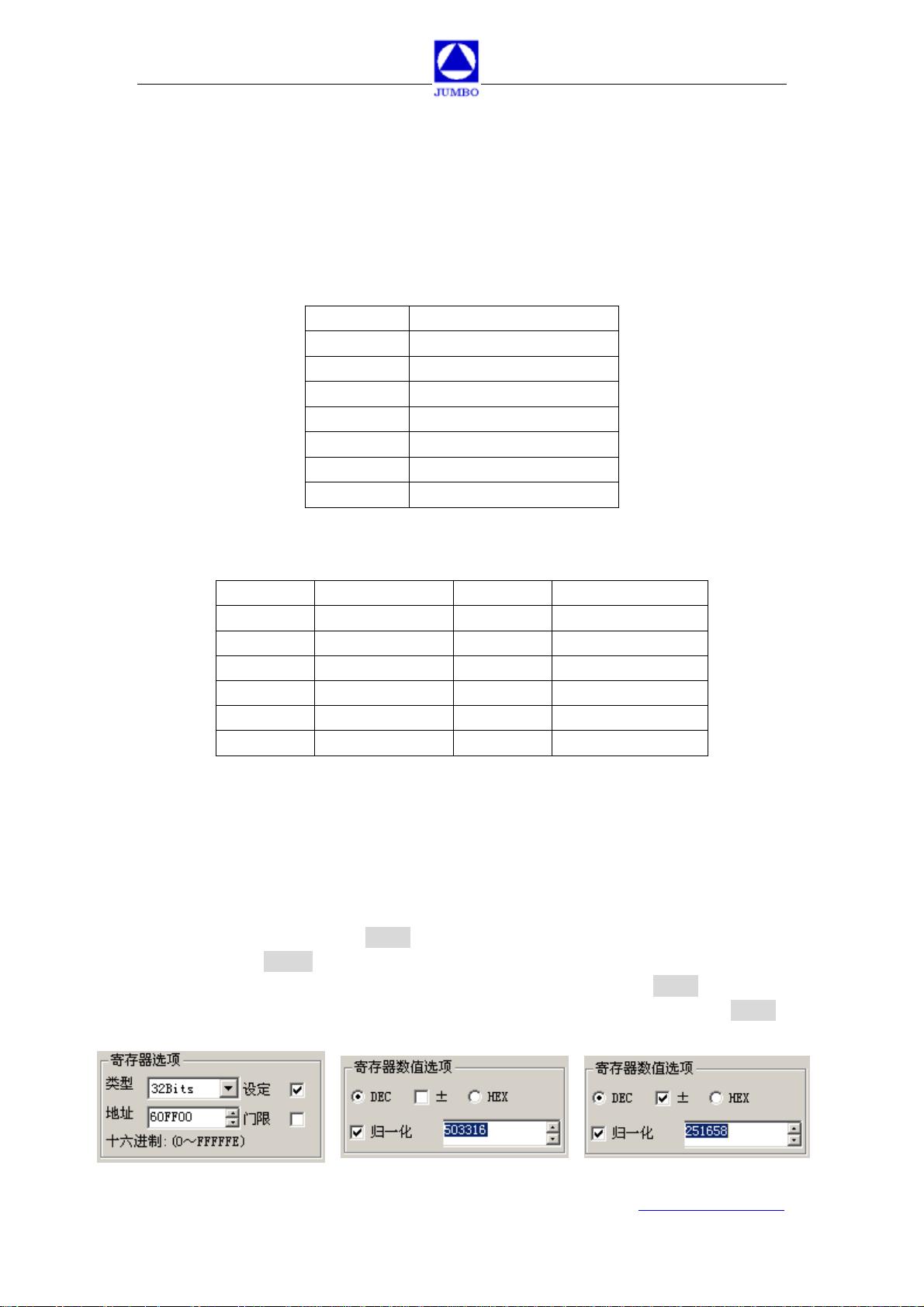
是 0,则在 JB_HMI 软件中的寄存器地址中输入“60FF00”,寄存器类型选择为 32Bits,若需
设定,需要选中“设定”选项,如图 1。另外,若需要进行数值转换以便直接显示和设定转
速,还需要选中“归一化”选项。针对转速单元“60FF00”,归一化数值需要输入“503316”,
该数值由(2^32)*60/(64*8000)计算所得(针对 32 位无符号整数),如图 2。如果为 32
位有符号整数,则需输入“251658”。该数值由(2^31)*60/(64*8000)计算所得,如图 3。
图 1
图 2 图 3
上海博深电子有限公司 1 http://www.chinahmi.com
下载后可阅读完整内容,剩余6页未读,立即下载
206 浏览量
307 浏览量
110 浏览量
111 浏览量
206 浏览量
点击了解资源详情
点击了解资源详情
103 浏览量
179 浏览量

weixin_38685521
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Blake3.NET:基于BLAKE3的SIMD Rust加密哈希函数快速托管包装器
- 婴儿产品电商网站模板构建指南
- termscroll: 简易终端项目列表展示与交互工具
- 迅捷S3随身wifi驱动1.2.2.4版发布,专业无线连接体验
- 使用CDK库在AWS部署KubeSphere容器服务
- 机械制图基础教程第五部分详解
- GlycoGlyphPublic:聚糖结构与CFG命名法的互相转换工具
- Popcorn中间件:简化RESTful API资源选择性请求
- Oracle 8数据库开发教程与源码解压缩
- Realtek瑞昱alc889/alc888/alc887声卡驱动For XP版发布
- 美化TreeView控件:VC实现菜单节点图标与色彩自定义
- CSS技巧打造个性化Messenger网页界面
- 深入解析低温传热中的关键问题
- Subline-crx插件: 新闻编辑的替代头条工具
- ReSpec版本定制预览:文档和服务工作器的结合
- Node.js 脚本轻松测试 Django API
