V90 PN伺服通信详解:控制字与状态字解析
版权申诉
"此文档详细解析了V90 PN伺服在通信报文中的控制字和状态字,特别是标准报文1,以及与西门子105和111报文的相关应用。它提供了如何理解和使用这些报文进行精确控制的信息。"
在V90 PN伺服的通信中,控制字和状态字是两个关键元素,它们用于指示伺服执行何种操作以及反馈其当前状态。标准报文1是通信的基础,其中的控制字STW1包含了多个位,每个位对应不同的功能。例如,047E控制字用于停止伺服,它将第12-15位设置为0,表示不强制打开抱闸;第8-11位设置为4,表示斜坡函数不生效且由PLC控制;第4-7位设置为7,意味着设定值使能,启动斜坡函数并满足运行条件;最后,第0-3位为E,意味着使能运行,但不触发OFF3和OFF2。而047F控制字在047E的基础上增加了第0位的F,表示在上升沿时ON,增强了启动控制。
状态字ZSW1则反映了伺服的运行状态。例如,转速设定值NSOLL_A的使用情况可以通过状态字来获取。此外,对于西门子105报文,它适用于1500或1500T系列,能实现速度轴、位置轴、同步轴、凸轮和运动系统的控制。该报文利用T0数据块提供工艺对象的配置数据,允许自动适配驱动和I/O设备,并通过PLCOPEN程序块进行编程。工艺对象可以控制单个驱动或驱动组,增强了系统的灵活性。
西门子111报文主要涉及FB284,这是一个用于循环激活SINAMICS驱动基本定位工艺功能的库函数。驱动侧需要使用标准报文111配合FB284,以实现更高级的定位控制。这个库在不同版本的S7-1200和1500系列CPU中有相应的更新,如FB284+FB285等,以适应不同版本的PLC软件。
在状态监控方面,报文中的一些特定位如13(无电机过热报警)、14(电机正转或反转状态)和15(无功率板过热报警)提供了关于设备健康状况的重要信息,帮助用户及时发现并解决潜在问题。
这份文档深入讲解了V90 PN伺服通信过程中的核心元素,对于理解如何通过控制字和状态字实现伺服的精细控制,以及如何利用西门子105和111报文进行复杂运动控制具有极高的参考价值。无论是故障排查还是系统设计,这些知识都将对工程师的工作带来极大的帮助。
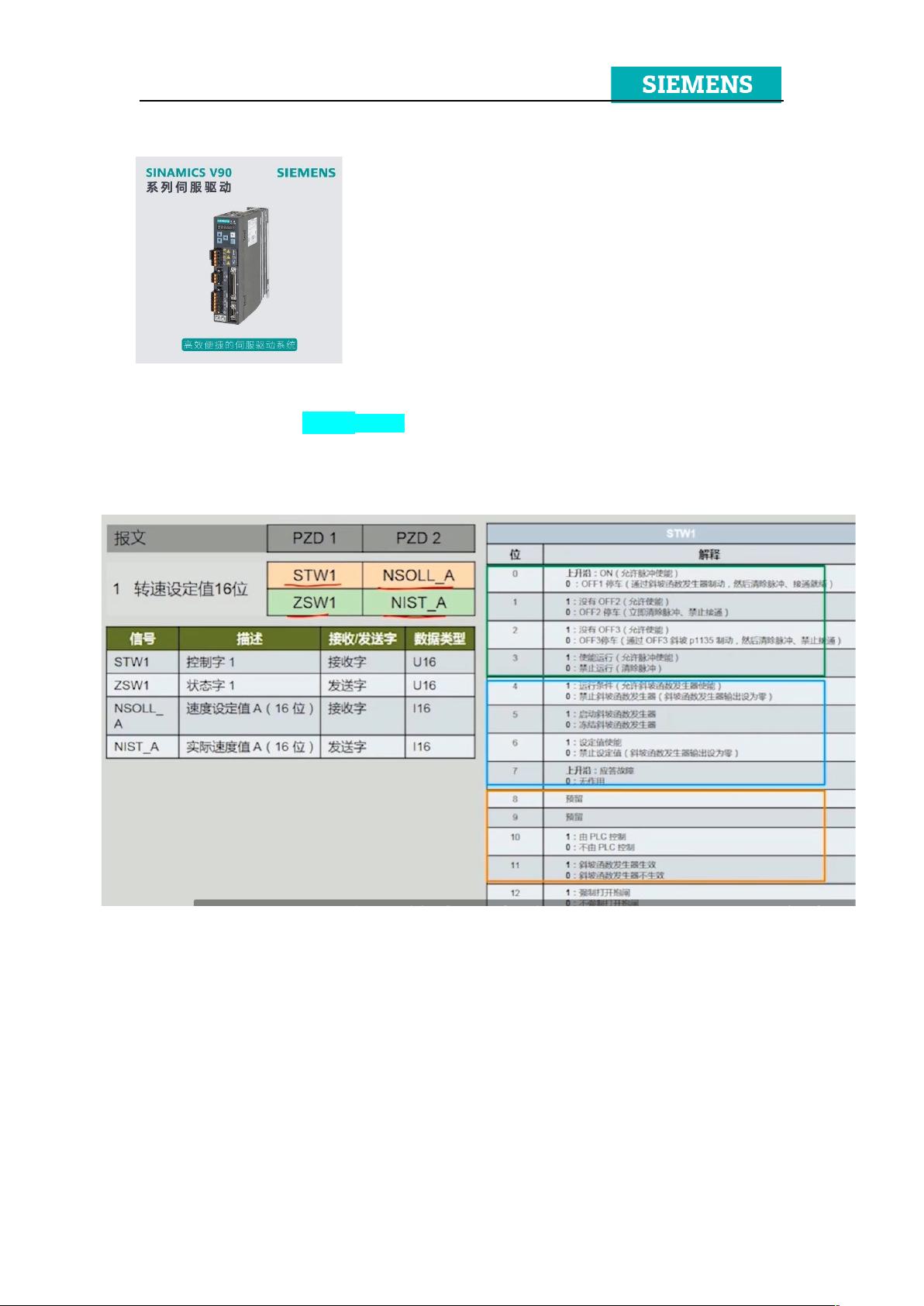
V90 PN 伺服_通信报文(标准报文 1+西门子 105+111)的控制字和状态字详解
标准报文 1 详细介绍:
如下图所示,右侧即为控制字 STW1 的每一位的具体功能说明,其中第 13、14、15 位为
预留,暂不使用
下载后可阅读完整内容,剩余5页未读,立即下载
8224 浏览量
1775 浏览量
1868 浏览量
1868 浏览量
120 浏览量
2024-04-03 上传
1657 浏览量

AAA_自动化工程师
- 粉丝: 7139
- 资源: 3491
 我的内容管理
展开
我的内容管理
展开







