MTi姿态传感器学习与通信协议详解
需积分: 13 162 浏览量
更新于2024-09-10
2
收藏 822KB PDF 举报
"这篇学习笔记主要介绍了荷兰Xsens公司的MTi姿态传感器,该设备集成了3D磁力仪、3D加速度计和3D陀螺仪,用于实时计算和输出滚动、俯仰和偏航角度。传感器支持RS-232/422接口,并提供了多种数据输出模式,包括四元数、欧拉角、旋转矩阵等。此外,还详细描述了坐标系统定义、数据包格式以及数据类型的详细要求。"
1. MTi姿态传感器概述
MTi是一款微型惯性测量单元,内置3D磁力仪、3D加速度计和3D陀螺仪,能提供校准后的3D线性加速度、旋转速度和地磁场数据。它具有实时计算三轴姿态的能力,适用于各种应用,如机器人导航、无人机控制和运动分析等。
2. 通信接口与协议
MTi传感器通过RS-232/422接口进行通信,需要注意的是,这些接口不是TTL电平,需要适配器转换后才能与单片机等设备通信。通信协议基于二进制,有流模式和轮询模式两种,用户可以通过C++类库"CMTComm"进行数据获取。
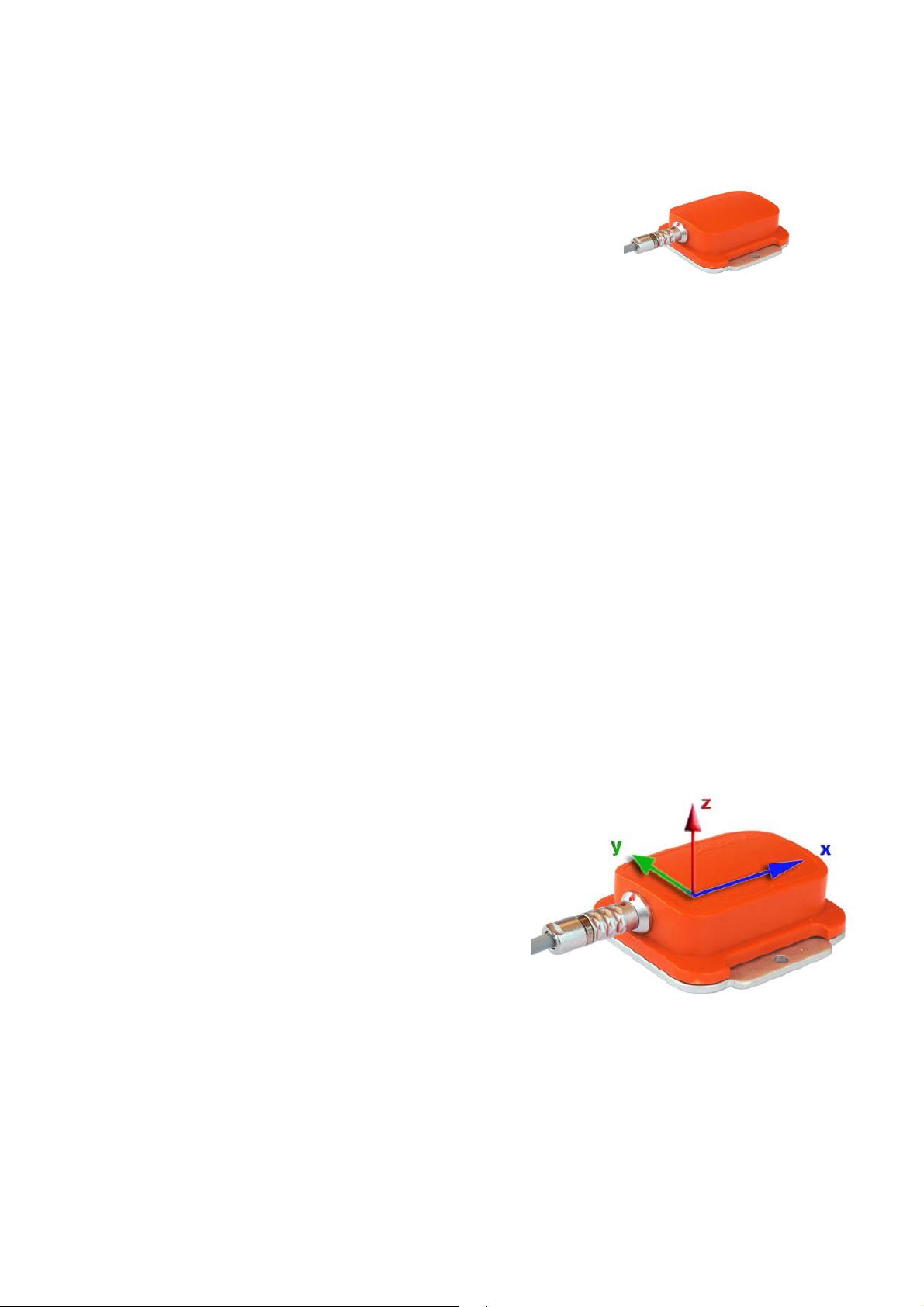
3. 坐标系统定义
MTi的坐标系统遵循右手坐标系,其中X轴指向地球磁场北极,Y轴指向西方,Z轴朝上。这种定义有助于正确解析传感器输出的方向数据。
4. 数据输出模式
- 四元数单位:表示三维空间中的旋转,是一种无损且无自旋的表示方式。
- 欧拉角:按照航天序列(Z-Y-X)给出旋转,包括俯仰、偏航和滚转。
- 旋转矩阵:以方向余弦矩阵形式表示姿态,遵循右手规则。
- 其他输出模式包括校准数据、非校准原始数据等,每种模式都有特定的数据格式。
5. 数据包结构与字节顺序
数据包以FA FF开头,LEN表示数据包长度,采用校验和方式进行错误检测。串口发送数据遵循大端字节序,即高字节优先。不同输出模式的数据字段包含不同类型的浮点或整型数据。
6. 数据类型需求
为了满足导航应用,需要获取校准后的数据(如加速度和欧拉角)。每个数据元素通常为单精度浮点型,总共有48个字节。
这篇学习笔记详细阐述了MTi传感器的基本功能、通信方法以及数据处理,对于理解和使用MTi传感器进行姿态测量和导航系统开发非常有帮助。
MTi 学习笔记
2014-01-09
1. 介绍
MTi 是集成了 3D 磁力仪(3D 指南针)的完整的微型惯性测量
单元,带有一个能够实时计算滚动,俯仰和偏航的嵌入式处理器,能
够输出校准的 3D 线性加速,旋转速度(陀螺仪),和(地球)的磁场
数据,支持各种先进的 IO,如 RS-232/422 和模拟输出(DAC)等。
2.同 MTi 的直接的底层通信
MTi 可直接连接 RS-232/422(注意它不是 TTL 电平,因此需要转
换一下才能和单片机等通讯),只需根据 MTi 的二进制通信协议以流
(自由运行)模式或轮询(请求)模式通过串口索要数据即可。(C++
类库‘CMTComm’软件包中包含了 MT 通信的源代码(C++))
3.坐标系统
● X 轴的正向指向地球磁场北极
● Y 轴符合右手坐标系(西)
● Z 轴正向朝上
4.输出模式
● 四元数单位(又称为欧拉参数)
● 欧拉角
7
、旋转、俯仰、偏航(航天序列)
下载后可阅读完整内容,剩余4页未读,立即下载
2019-07-25 上传
2010-05-19 上传
2024-04-11 上传
2024-07-12 上传
2024-11-15 上传

Jory_forever
- 粉丝: 4
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
