基于ARM9与DSP的移动机器人运动控制器设计
版权申诉
127 浏览量
更新于2024-06-25
收藏 1.12MB DOC 举报
"基于DSP小型地面移动机器人运动控制系统设计毕业设计"
本文主要介绍了一种基于DSP(数字信号处理器)的小型地面移动机器人运动控制系统的详细设计。该系统旨在满足高智能化移动机器人的实时性和快速响应需求,适用于执行如侦查、排爆、消防等危险任务。
在硬件设计部分,采用了ARM9处理器作为主控芯片,负责整个系统的管理和协调工作。而DSP被用作分布式控制芯片,专门处理电机控制相关的高速运算。硬件电路设计包括以下几个关键模块:
1. DSP最小系统:这是DSP控制器的基础,包含了DSP芯片、电源、时钟和复位电路等,确保DSP正常运行。
2. 电机驱动:设计了电机驱动电路,用于转换数字信号为电机所需的驱动电压,驱动无刷直流电机(BLDC)运行。
3. 电机电流检测:通过霍尔效应传感器或其他电流检测元件监测电机运行状态,防止过载。
4. 电机位置检测:使用编码器或其他位置感应装置,确保电机准确换相和速度控制。
5. 电机过压欠压保护:设置了保护电路,当电机电源电压超出安全范围时,能及时切断电源,保护电机和控制器。
通信方面,ARM9主控制器与DSP分布式控制器之间采用CAN(Controller Area Network)总线进行高效、可靠的通信,实现数据交换和协调控制。
在控制算法上,该系统采用了速度环和电流环的双闭环控制策略,增强了系统的稳定性。同时,引入了积分分离PID控制算法,改进了传统的PID控制,提升了速度调节的精度和响应速度。
软件设计部分主要包括主程序和多个中断服务子程序。中断子程序涵盖了电机换相、速度计算、PWM(脉宽调制)输出、速度控制以及CAN总线通信等功能。这些子程序协同工作,确保机器人运动的精确控制和实时反馈。
关键词:移动机器人,ARM9,DSP运动控制器,无刷直流电机,PWM
该毕业设计提供了一个全面的解决方案,涵盖了硬件构建、控制算法设计和软件编程,为实现高效、智能的小型地面移动机器人运动控制提供了坚实的基础。

第二章 控制系统总体概述
- 5 -
人直流电机参数。
表 2-1 移动机器人直流电机参数
额定功率
400W
堵转转矩
11000mNm
机械时间常数
4.3ms
额定电压
48V
空载电流
740mA
最大效率
86%
最大工作电流
9.3A
空载转速
5400rpm
相间电阻
0.37Ohm
额定转矩
688mNm
转矩常数
85mNm/A
相间电感
0.27mH
堵转电流
139A
速度常数
113rpm/V
转子惯量
831gcm
2
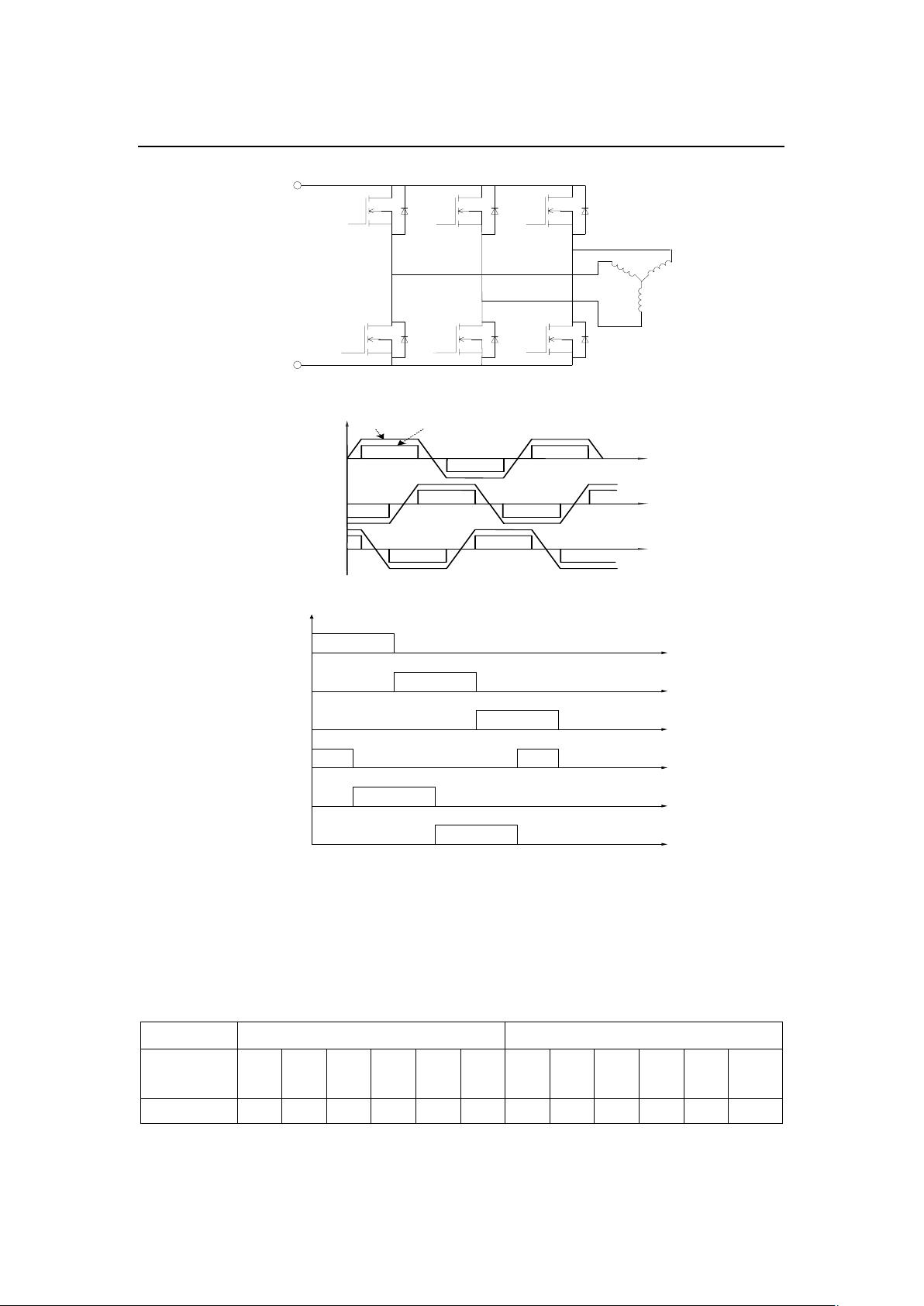
2.2.2 无刷直流电机结构及工作原理
MAXON 公司的 EC 系列电机属于无刷直流电动机,它主要有电机本体,霍
尔位置传感器和电子开关线路三部分组成。电机本体主要包括定子和转子两部
分。定子绕组分为 A、B、C 三相,每相相位相差 120°,采用星形连接,三相
绕组分别与电子开关线路中相应的功率开关器件连接。转子由 N、S 两极组成,
极对数为 1。图 2-2 为三相两极无刷直流电机结构。
图 2-2 三相两极无刷电机的结构
电子开关线路用来控制电动机定子上各相绕组通电的顺序和时间,主要有
功率逻辑开关单元和霍尔位置传感器信号处理单元两部分组成。功率逻辑开关
单元将电源功率以一定的逻辑分配关系分配给电机定子上的各相绕组,以便使
电机产生持续不断的转矩。霍尔位置传感器的作用是检测转子磁极相对于定子
绕组的位置信号,进而控制逻辑开关单元的各相绕组的导通顺序和导通时间。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场
相互作用而产生转矩,驱动转子旋转,再由霍尔位置传感器将转子磁钢位置变
换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定
子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次
序与转子转角同步,因而起到了机械换向器的换向作用。

剩余51页未读,继续阅读
2023-07-13 上传
2023-03-06 上传
2020-01-20 上传
2023-05-30 上传
2023-06-09 上传
2023-05-05 上传
2023-05-18 上传
2023-06-09 上传
2023-12-30 上传

老帽爬新坡
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
