网络控制系统的随机通信延迟补偿设计与分析
PDF格式 | 882KB |
更新于2024-08-27
| 47 浏览量 | 举报
本文标题"Analysis and design of the time-delay compensation for networked control systems with random communication delay"聚焦于网络控制系统的时延补偿问题,特别是在存在随机通信延迟的情况下。网络控制系统由于其分布式特性,经常面临通信延迟带来的挑战,这可能对系统的稳定性和控制性能产生显著影响。该研究由LIUTing、JIANG Shun和PAN Feng三位作者共同完成,他们隶属于江南大学轻工先进过程控制重点实验室,位于无锡。
本文的核心贡献在于提出了一种基于广义预测控制(Generalized Predictive Control,GPC)的方法来设计时间延迟补偿控制器。传统的时延补偿策略往往依赖于确定性的模型,而本文则突破了这一局限,将控制参数设计与随机通信延迟的实际特性结合起来。这种方法允许控制器更精确地应对不同类型的时延,从而提高系统的动态响应和控制精度。
作者们特别关注的是闭环控制系统在随机延迟环境下的稳定性分析。他们构建了适用于这种复杂网络环境下的稳定性条件,确保了补偿策略的有效性和系统的安全性。为了验证理论成果,文中采用了True Time toolbox进行仿真,对固定延迟和随机延迟两种情况进行了深入分析,评估了补偿控制器在实际网络通信环境中的表现。
通过本文的研究,读者可以了解到如何在面对网络控制系统的不确定性因素时,有效地设计和优化时间延迟补偿策略,这对于提升网络控制系统在工业自动化、远程监控等领域的应用性能具有重要的实践意义。同时,这项工作也为未来处理随机通信延迟的控制理论研究提供了新的视角和方法。
Analysis and Design of the Time-delay Compensation for Networked
Control Systems with Random Communication Delay
LIU Ting, JIANG Shun, PAN Feng
Key Laboratory of Advanced Process Control for Light Industry (Ministry of Education), Jiangnan University, Wuxi, 214122
Email: liuting_jndx@163.com
Abstract: Aiming at the compensation issues of the random communication delay in networked control systems, this paper
proposes a method to design the time-delay compensation controller based on generalized predictive control. The compensation
controller consists of the network predictor and the time-delay compensator, which is used to make up for the delay with different
characteristics. Different from the traditional determination method, the control parameters depend on the random delay is given
in this paper, which can improve the system performance. Furthermore, the stability conditions of the closed-loop control system
are also constructed. Using TrueTime toolbox to simulate the real network communication, both of fixed delay and stochastic
delay in networked environment are considered to analyze the compensating performance, and the corresponding effect of
different control parameters. The simulated results illustrate a better performance of the varying-parameter compensation
controller than the fixed one.
Key Words: networked control systems, generalized predictive control, random delay, varying parameters, stability
1 Introduction
In recent years, the industrial field goes through great
changes. It requires not only to implement completely
decentralized control and resource share inside, but also to
connect to the Internet to realize remote control externally.
Networked control systems provide a feasible control mode
and become one of the current international frontier in the
field of network communication and control theory
[1,2]
.
In networked control systems, spatially decentralized
control nodes are connected by the communication network,
of which the introduction leads to characteristics different
from the traditional control. The basic problems are grouped
as network communication, control strategy and
collaborative design
[3]
. Among them, control strategy aims to
achieve controllers tolerating communication delay,
sequential disorder and packet loss.
The communication delay enables the system
performance to get worse, even leads to instability.
Influenced by communication protocol, transmission rate
and packet size, it is shown to be fixed, random, bounded or
unbounded. The difficulties of research are the uncertainty of
random delay and the serious lag caused by long delay. So
far, various control strategies are considered, including
deterministic control
[4]
, random control
[5,6]
, intelligent
control
[7]
, robust control
[8,9]
, networked predictive
control
[10-12]
, etc. The networked predictive control achieves
stability and reliability and significantly improves the system
performance. However, too many assumptions are made to
the delay to conform to the real characteristics. In [10], the
networked round-trip delay is substituted for the delay in the
feedback and the forward channel, which is not a simple
addition. In [11], communication delay is estimated through
storage queue online, but it increases the delay artificially.
In this paper, different compensation mechanisms are
designed for the delay in the feedback and the forward
*
This work is supported by National Natural Science Foundation (NNSF)
of China under Grant 61403168.
channel. Generalized predictive control is adopted, which
possesses strong environmental adaptability and robustness.
TrueTime toolbox is used here to simulate the real network.
The main contributions of this paper can be highlighted as
follows: 1) the control parameters are discussed and a
determination method is given for the networked control
strategy; 2) a comparison is made between the compensating
performance of these two different delays; and 3) the
stability conditions of closed system are concluded as well.
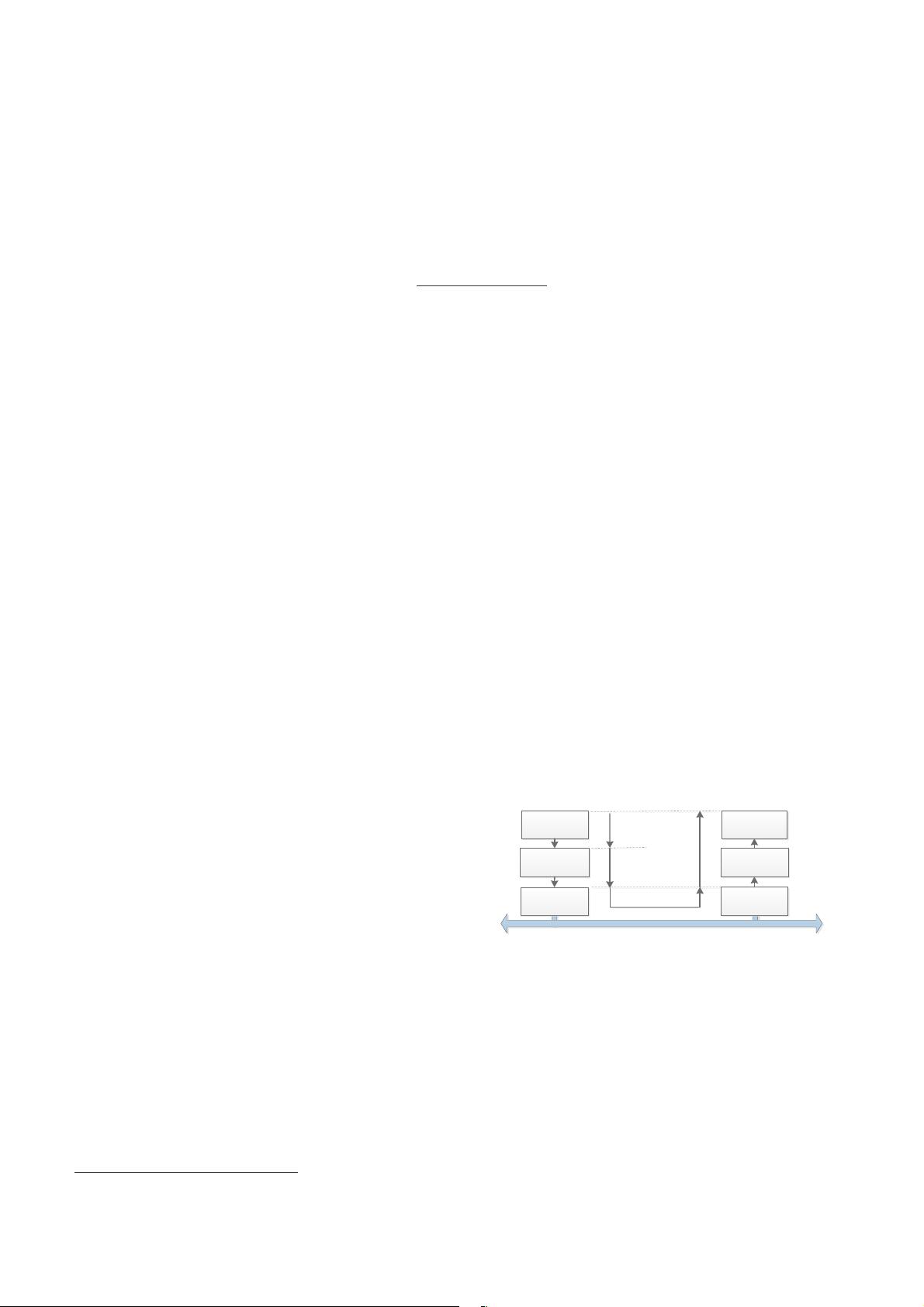
2 Structure of networked control systems with
random communication delay
The characteristic analysis divides the communication
delay into four parts: send-processing delay
send
T
, waiting
delay
wait
T
, transmission delay
ts
T
and receive-processing
delay
rev
T
. The specific distribution as is shown in Fig.1.
send
T
wait
T
ts
T
rev
T
Application
layer
Link layer
Physical layer
Node A
Application
layer
Link layer
Physical layer
Node B
Fig.1 Specific distribution of the communication delay
send
T
and
rev
T
depend on the software and the hardware
performance of source equipment and destination equipment
respectively and turn to be certain.
wait
T
is determined by the
protocol in MAC layer, connection type and network load,
etc.
ts
T
lies on the network bandwidth and the transmission
distance, which is determinate. Thus, the communication
delay is composed of the determinate part and the uncertain
part, and the uncertainty mainly comes from
wait
T
. To sum
up, networked control systems inevitably possess random,
time-variant, or uncertain communication delay because of
the limited network carrying capacity.
Proceedings of the 35th Chinese Control Conference
Jul
y
27-29, 2016, Chen
g
du, China
7234
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐


97 浏览量
75 浏览量


weixin_38660731
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
