"深入探讨:其他SLAM系统及RTABMAP算法"
下载需积分: 5 | PPTX格式 | 5.18MB |
更新于2023-12-31
| 179 浏览量 | 举报
第10章 其他SLAM系统涵盖了一些不同于传统激光SLAM和视觉SLAM系统的新兴SLAM技术。RTABMAP算法是其中之一,它采用基于优化的方法来求解SLAM问题,同时遵循前端里程计、后端优化和闭环检测的三段式范式。这种方法的特点是支持视觉和激光融合,且具有高效的内存管理机制。另一种新兴的SLAM系统是VINS算法,它融合了机器学习和SLAM技术,通过视觉和惯性传感器的数据,实现了对机器人位置和运动的实时估计。这些新系统的出现为SLAM技术的发展带来了新的可能性,为自主导航系统的发展提供了更多的选择。除了RTABMAP和VINS算法,书中还介绍了机器学习与SLAM的结合,展示了该领域的前沿技术和未来发展方向。通过对这些新兴SLAM系统的学习和掌握,读者将能够更全面地了解目前SLAM技术的发展状况,为自主导航系统的应用和开发提供更多的参考和可能性。
总的来说,本书主要分为编程基础篇、硬件基础篇、SLAM篇和自主导航篇四个部分,通过这些部分的内容安排,读者可以系统地学习和掌握ROS机器人操作系统的基本知识、C编程范式、OpenCV图像处理等编程基础知识,以及机器人传感器、机器人主机、机器人底盘等硬件基础知识。在SLAM篇部分,读者可以学习到SLAM中的数学基础、激光SLAM系统、视觉SLAM系统以及其他新兴SLAM系统的知识。最后,在自主导航篇中,读者将了解到自主导航中的数学基础、典型自主导航系统以及机器人SLAM导航的综合实战内容。通过系统地学习这些内容,读者将能够全面了解机器人技术的相关知识,并掌握相关的编程和硬件技能,从而为自主导航系统的开发和应用提供坚实的基础。
总的来说,本书对于想要学习机器人技术和自主导航系统开发的读者来说,是一本非常全面和系统的教材。通过本书的学习,读者将能够全面了解目前机器人技术和自主导航系统的发展状况,掌握相关的编程和硬件技能,从而为未来的相关工作做好充分的准备。同时,本书还对一些新兴的SLAM系统和前沿技术进行了介绍,为读者打开了新的技术视野,帮助他们更好地把握未来机器人技术发展的趋势。因此,本书不仅适合作为机器人技术和自主导航系统的教材,也适合作为相关行业从业者的进阶参考书,可以为他们的工作提供更多的可能性和选择。
10.1 RTABMAP算法
5/34
第10章 其他SLAM系统
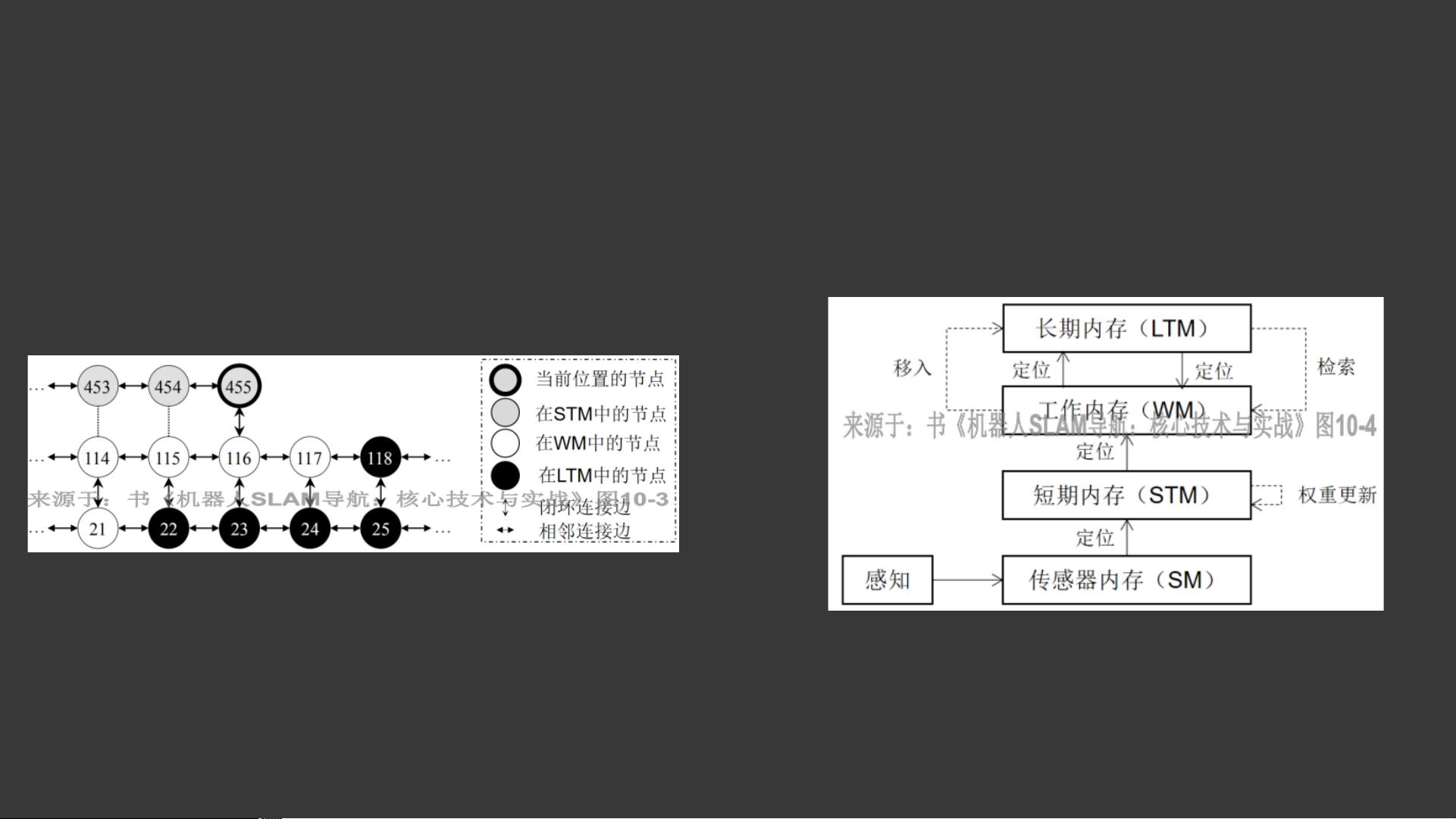
RTABMAP原理分析
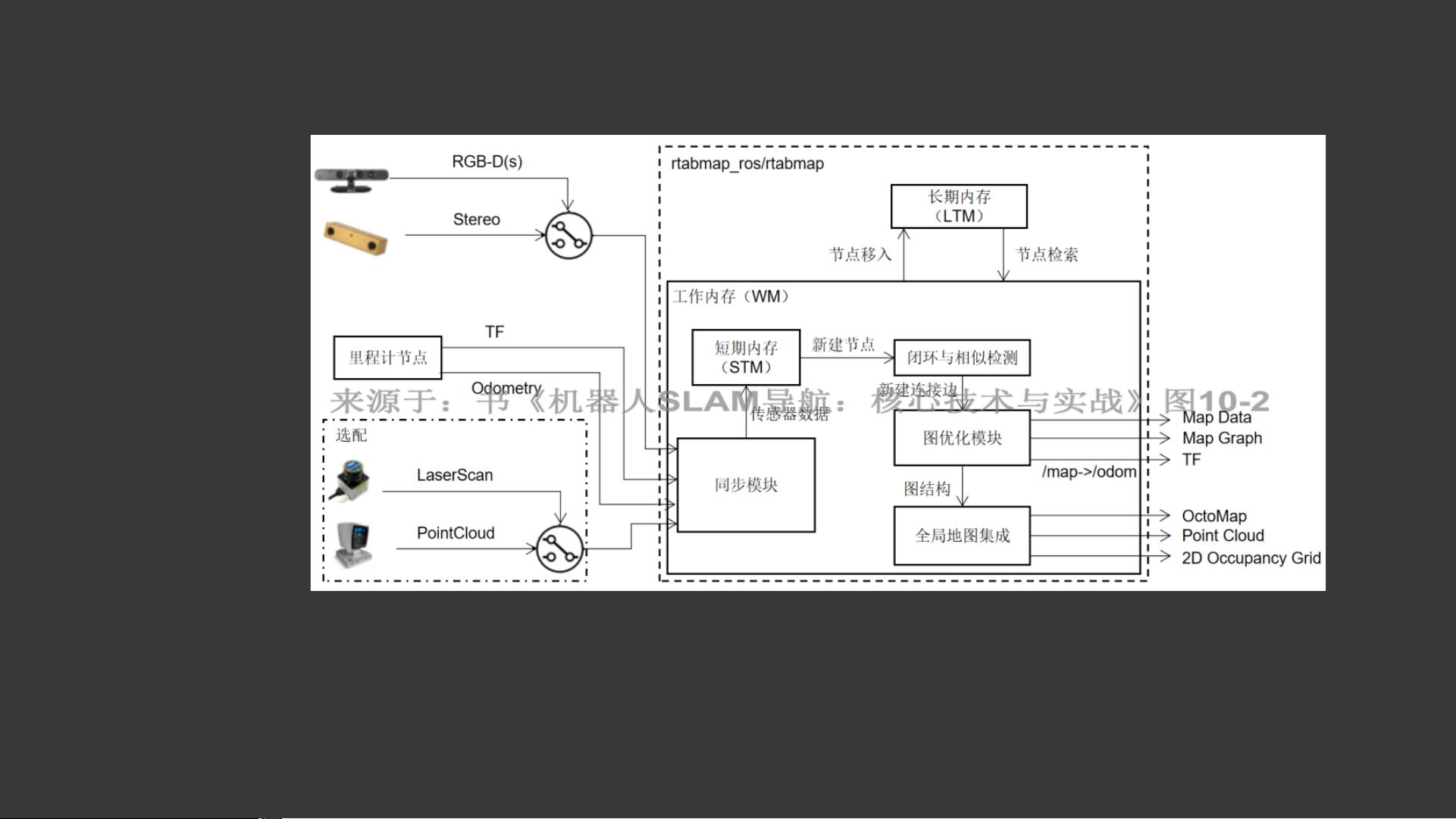
RTABMAP系统框架
输入
支持视觉、激光和里程计这3种传感器数据的输入,其中视觉是必备的传感器,激光是选配的传感器,而里程计由一个单独的ROS节点(Odometry Node)来提供
输出
最终输出的全局地图有3种格式,即OctoMap(3D Occupancy Grid)、Point Cloud和2D Occupancy Grid可选
剩余32页未读,继续阅读
相关推荐





xiaoli8748_软件开发
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python爬虫新手入门与实战练习指南
- 自动生成readme文件的测试项目解析
- LeetCode算法题解集:Java与JavaScript的实战演练
- Rx.Http:在.NET Core实现异步HTTP请求的React式库
- McAfee 防病毒企业版安装与更新指南
- VC实现列表框Tip提示效果的源码解析
- BitfighterViewer:基于Lua API的实时游戏提要展示工具
- 金属知识基础指南及机械知识压缩包
- 2013版最新房贷计算器全面上线
- KUDAPACH_TODOLIST:简约而不失功能性的待办事项管理工具
- 基于FCM算法的图像分割matlab实现及核函数应用
- ChatWorkTemplate-crx:高效管理Chatwork模板插件
- 实现始终置顶的VC窗口源代码
- Next.js快速入门与部署指南
- asconsole: 浏览器控制台在Flash ActionScript调试中的应用
- 51单片机开发的智能计算器项目介绍
