发那科机器人配置CC-LINK通讯指南
版权申诉
19 浏览量
更新于2024-08-06
收藏 718KB PDF 举报
本文档详细介绍了发那科机器人与CC-LINK通讯的配置过程,包括定义、硬件准备、外部条件、所需技能、工作步骤以及软件设置等关键环节。
1. 定义
CC-LINK(Control & Communication Link)是由三菱电机开发的一种高速现场总线系统,具备大容量数据传输能力,最高速度可达10Mb/s。网络结构通常包含一个主站和最多64个从站,从站可包括远程I/O站、远程设备站、智能设备站和本地站。在CC-LINK网络中,发那科机器人只能作为从站参与通信。
2. 工作准备
要进行CC-LINK通讯配置,需要准备以下硬件:
- CC-LINK板卡
- 专用通讯电缆
- 终端电阻(视情况选择)
软件方面,需使用1A05B-2500-J786 CC-Link Interface。
3. 外部条件
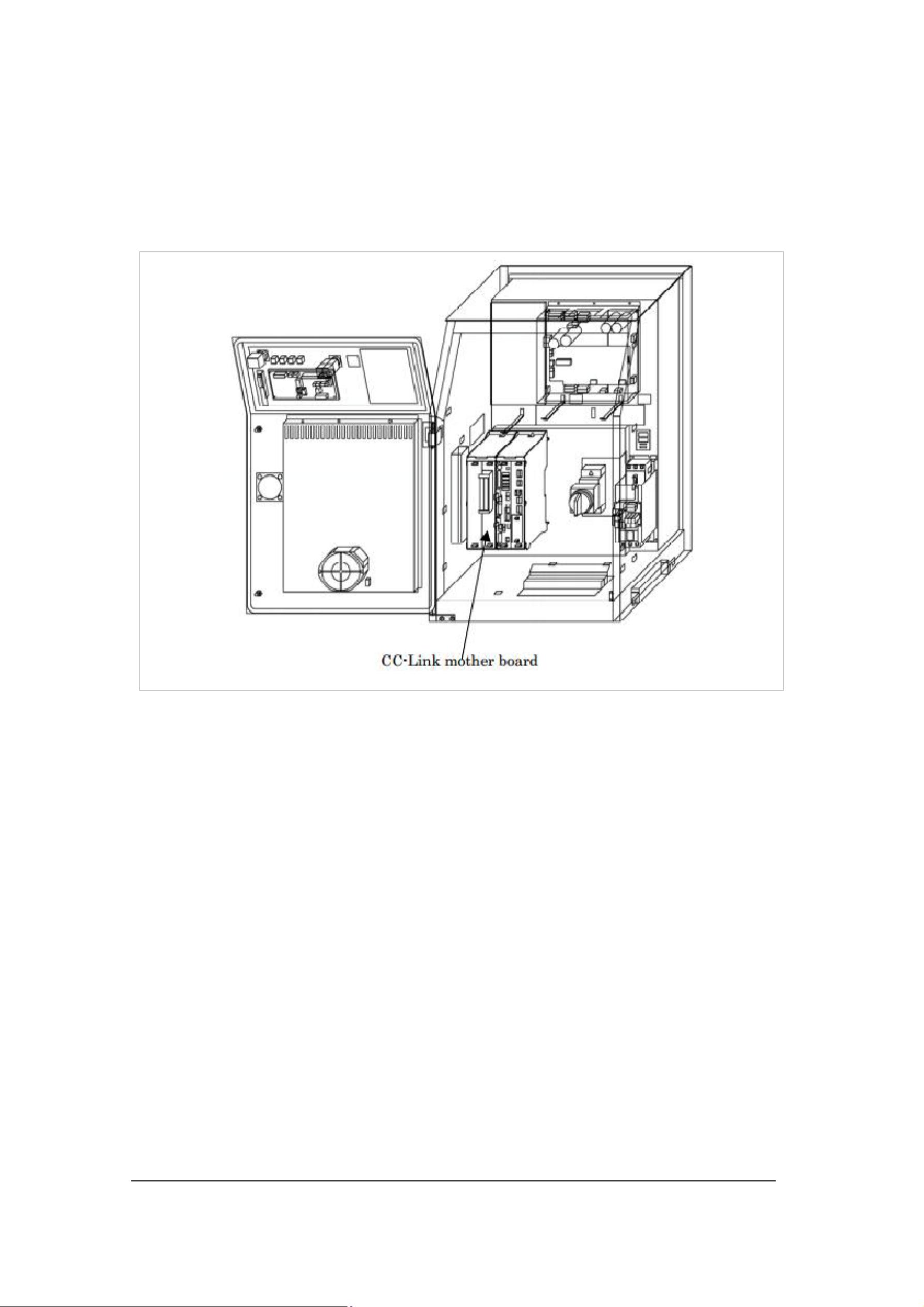
确保CC-LINK板卡已正确安装在机器人控制柜内。
4. 所需技能
操作者应具备基础的示教器操作及IO配置知识。
5. 工作步骤
- 断开机器人控制柜电源,然后进行电缆布线,并剥去电缆前端的外皮。
- 将电缆接入CC-LINK连接口,注意DA、DB、DG、泄电线与接口的对应连接,同时将FG端子接地。
- PLC端的接线也需遵循相应规则,终端电阻的使用取决于机器人在网络中的位置。
- 在设置界面中调整参数,如错误报警(Error one-shot)、站号(STATION NO)、站数(NUMBER of Stations)、波特率(Baudrate)等。
5.2.1 软件设置
- 错误报警:DISABLE表示只有解除CC-LINK报警,机器人才能动作;ENABLE则允许机器人在报警状态下继续动作。
- 站号(STATION NO):设置机器人的唯一ID。
- 站数(NUMBER of Stations):根据网络中实际从站数量设置。
- 波特率(Baudrate):根据需要设置通信速率。
- RWr(远程寄存器):根据PLC站数自动设定,用户通常无需手动调整。
- Number of AOs:模拟输出的数量。
综上,配置发那科机器人与CC-LINK通讯涉及多个步骤,包括硬件连接、软件参数设置等,确保所有设备和设置正确无误,才能实现高效稳定的通信。在实施过程中,应注意每个环节的细节,如终端电阻的正确使用,以避免通信问题。
CC-LINK 通讯配置
1 / 5
下载后可阅读完整内容,剩余4页未读,立即下载
1915 浏览量
237 浏览量
442 浏览量

竖子敢尔
- 粉丝: 1w+
- 资源: 2468
 我的内容管理
展开
我的内容管理
展开







最新资源
- 华为内部linux教程
- 微软ASP.NET AJAX框架剖析
- MPEG-4 ISO 标准 ISO/IEC14496-5
- 转贴:随心所欲的Web页面打印技术
- c语言100例.doc
- JSP数据库编程指南.pdf
- 完全精通局域网-局域网速查手册
- ENVI遥感影像处理专题与实践\用户指南与实习指南.pdf
- 软考试卷06下cxys.pdf
- usb设备驱动开发详解-讲座
- 深入浅出Win32多线程程序设计
- 水文控制系统子程序详细的mp430程序
- John.Lions-Lions'.Commentary.on.UNIX.6th.Edition.with.Source.Code.pdf
- PHP和MySQL Web开发 第四版
- ArcGIS Server 9.2 javascript ADF核心 帮助文档
- java 基础及入门
