RANSAC算法详解与MATLAB工具箱应用
"这篇文档是关于RANSAC(随机样本一致)算法的详细解释,以及如何在Matlab toolbox中使用该算法。作者Marco Zuliani提供了包含实例的指南,适用于Matlab和Octave平台。文档涵盖了RANSAC的基本概念、参数估计在异常值存在时的问题,以及RANSAC算法的工作原理。"
RANSAC(Random Sample Consensus,随机样本一致)是一种用于处理带有噪声数据的模型参数估计方法,特别适用于在存在大量异常值(outliers)的情况下。在计算机视觉、图像处理和几何建模等领域中,RANSAC广泛应用于直线检测、平面估计、特征匹配等任务。
1. 引言
RANSAC算法旨在从含有噪声和异常值的数据集中估计模型参数。它通过反复抽取随机子集来寻找一个能最好地解释大部分数据的简单模型。这种方法的核心思想是假设数据中有大部分是符合特定模型的内点(inliers),而小部分是不规则的外点(outliers)。
2. 参数估计与异常值问题
2.1 二维直线估计
为了直观理解,文档以二维直线估计为例。在这个例子中,RANSAC通过最小化内点到拟合直线的距离来估计直线方程。最大似然估计(Maximum Likelihood Estimation, MLE)通常用于求解模型参数,但在有异常值的情况下,MLE可能会被外点误导,导致不准确的结果。
2.2 异常值、偏置与破坏点
2.2.1 异常值:异常值是指那些不遵循大多数数据模式的数据点,它们可能是由于测量错误、数据污染或目标环境的特殊条件导致的。
2.2.2 偏置:当异常值存在时,参数估计可能产生偏置,即估计结果偏离真实值。
2.2.3 破坏点:破坏点是当异常值比例达到某个阈值时,导致模型估计完全失效的临界点。
2.3 2D线性最小二乘估计器的破坏点
破坏点是线性最小二乘估计器能够容忍的最大异常值比例,超过这个比例,估计器将无法给出有效的模型。
3. 随机样本一致(RANSAC)
RANSAC算法工作流程包括以下步骤:
1. 选择随机子集(通常是3个点)来拟合模型。
2. 计算剩余数据点到模型的残差,将残差低于阈值的点标记为内点。
3. 如果内点的数量超过了预设的最小内点数,用这些内点重新估计模型。
4. 重复步骤1-3,直到达到迭代次数上限或找到最优模型。
5. 最终模型由包含最多内点的模型决定。
在Matlab toolbox中,用户可以利用提供的函数和工具来应用RANSAC,例如进行直线、平面或其他几何结构的估计。文档还可能包含了具体使用Matlab和Octave的示例代码,帮助读者理解和实现RANSAC算法。
RANSAC是解决异常值问题的有效工具,通过不断迭代和选择最佳模型,它能够从杂乱无章的数据中提取出有用的信息。在实际应用中,正确设置参数如迭代次数、阈值和最小内点数,对于获得高质量的模型至关重要。
Draft
Copyright of Marco Zuliani 2008–2011 Draft
of a model using datasets containing more than 50% of outliers.
Despite many modifications, the RANSAC algorithm is essentially composed of
two steps that are repeated in an iterative fashion (hypothesize–and–test framework):
• Hypothesize. First minimal sample sets (MSSs) are randomly selected from
the input dataset and the model parameters are computed using only the el-
ements of the MSS. The cardinality of the MSS is the smallest sufficient to
determine the model parameters
2
(as opposed to other approaches, such as
least squares, where the parameters are estimated using all the data available,
possibly with appropriate weights).
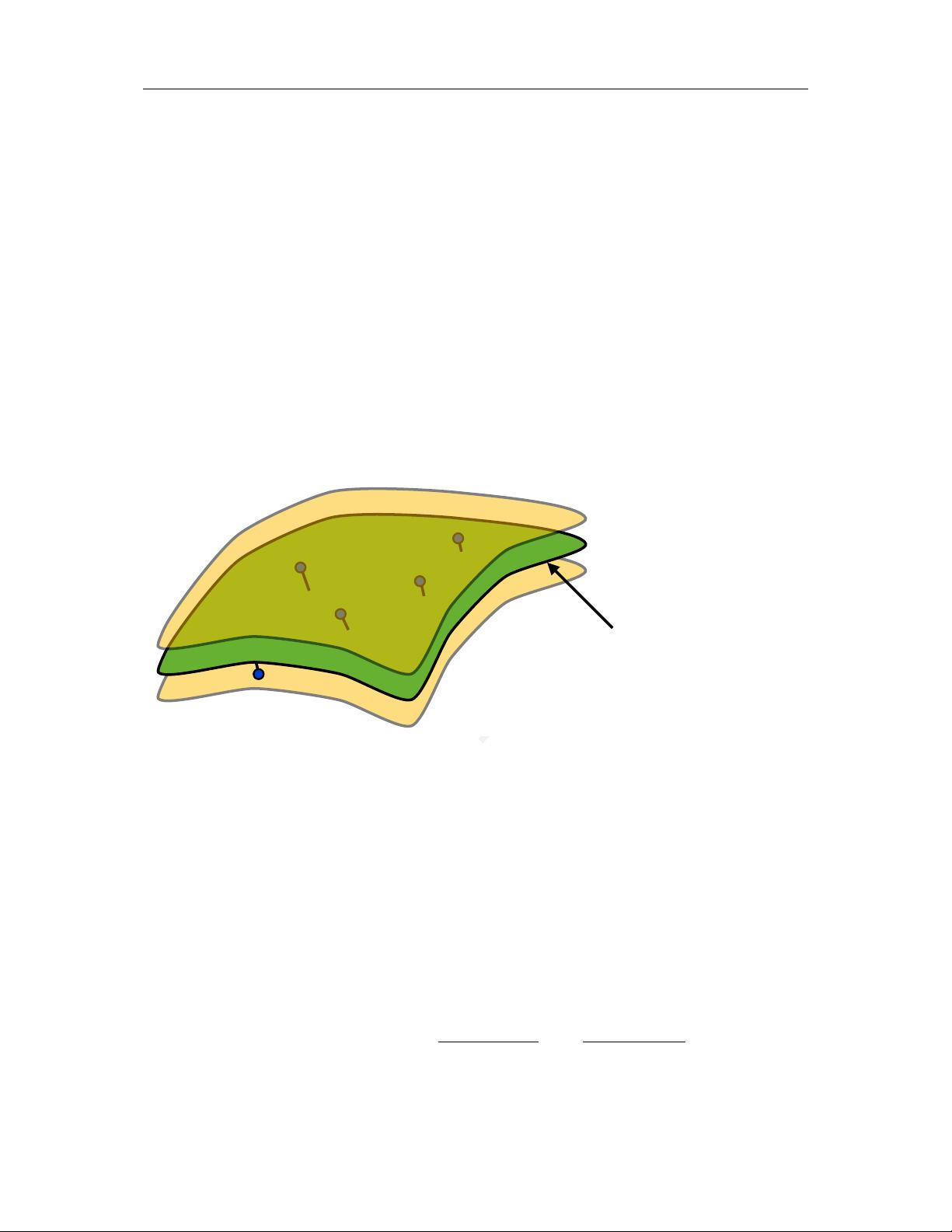
• Test. In the second step RANSAC checks which elements of the entire dataset
are consistent with the model instantiated with the parameters estimated in
the first step. The set of such elements is called consensus set (CS).
RANSAC terminates when the probability of finding a better ranked CS drops be-
low a certain threshold. In the original formulation the ranking of the CS was its
cardinality ( i.e. CSs that contain more elements are ranked better than CSs that
contain fewer elements).
3.2 Preliminaries
To facilitate the discussion that follows, it is convenient to introduce a suitable
formalism to describe the steps for the estimation of the model parameters and for
the construction of the CS. As usual we will denote vectors with boldface letters
and the superscript
(h)
will indicate the h
th
iteration. The symbol ˆx indicates the
estimated value of the quantity x. The input dataset, which is composed of N
elements, is indicated by D = {d
1
, . . . , d
N
} and we will indicate a MSS with the
letter s. Let θ ({d
1
, . . . , d
h
}) be the parameter vector estimated using the set of
data {d
1
, . . . , d
h
}, where h ≥ k and k is the cardinality of the MSS. The model space
M is defined as:
M(θ)
def
=
d ∈ R
d
: f
M
(d; θ) = 0
where θ is a parameter vector and f
M
is a smooth function whose zero level set
contains all the points that fit the model M instantiated with the parameter vector
2
Suppose we want to estimate a line: in this case the cardinality of the MSS is 2, since at least
two distinct points are needed to uniquely define a line.
16


剩余100页未读,继续阅读
4272 浏览量
2022-09-21 上传
122 浏览量
2023-07-24 上传
1063 浏览量
2538 浏览量
255 浏览量

乡村的风你的香
- 粉丝: 1
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- CI--EA实施
- 24L01模块原理图+PCB两种天线三块板子
- Horiseon-proyect
- SimbirSoft
- 钟摆模型:用于不同实验的 Simulink 模型-matlab开发
- shopcart.me
- 6ES7214-1AG40-0XB0_V04.04.00.zip
- hivexmlserde jar包与配套数据.rar
- KeepLayout:使自动布局更易于编码
- worldAtlas
- AdvancedPython2BA-Labo1
- lsqmultinonlin:共享参数的全局参数非线性回归-matlab开发
- STK3311-WV Preliminary Datasheet v0.9.rar
- js实现二级菜单.zip
- 微店助理 千鱼微店助理 v1.0
- tao-of-rust-codes:作者的回购
