基于Arduino和STM32的六轴小型机械臂设计与智能控制
版权申诉
7 浏览量
更新于2024-06-14
1
收藏 6.9MB PDF 举报
"基于Arduino的六轴机械臂的设计与实现.pdf"
本文主要探讨了在当前劳动力短缺和成本上升的社会背景下,如何设计和实现一款基于Arduino和STM32开发板的小型六轴机械臂,以满足中小企业生产线的需求。六轴机械臂在工业自动化中扮演着重要角色,但大型机械臂由于成本高、体积大、操作复杂等因素,不适合在中小企业广泛应用。因此,设计一款小型且易于操控的机械臂显得尤为关键。
文章首先对小型六轴机械臂进行了运动学分析,运用MATLAB和Robotics Toolbox进行建模和运动空间仿真,以便于理解其运动特性。在控制系统方面,文章提出了一种结合模糊控制原理的参数自适应PID控制器。这种控制器利用系统的偏差和偏差变化率作为输入,通过调整PID参数,实现了对机械臂的智能、非线性控制,提高了控制精度和稳定性。
实验结果显示,采用本文设计的六轴机械臂相比于基于传统PID或回归神经网络算法的低成本机械臂,具备更高的精度、更小的抖动,并支持多种传感器控制,操作简便。这为低成本小型六轴机械臂在中小企业及中小产品生产线上的应用提供了可行性。
关键词包括:机械臂、Arduino、STM32、六轴、多传感器控制、PID。文章深入研究了如何利用开源硬件平台Arduino和高性能微控制器STM32,以及创新的控制策略,实现了一款高效、灵活的小型六轴机械臂系统,为未来低成本自动化解决方案的研发提供了新的思路。
第
二
章 机 械 臂 的
运
动 学
分 析
第
二
章
机
械
臂 的
运
动 学分
析
六轴 机械臂
可
以
看 成 是
一
个
由
6
个
关
节
连
接起
来 的 串 联
机
构
,
本 章
主
要
研
究
其
6
轴
运
动 学
规
律
,
为 机械臂 的
控
制
和
设
计
打
下
一
个
良
好
的
基
础
。
2
.
1
机械臂
运
动
学
分
析
单
纯
的
研
究
机
械
臂 的
速
度
、
加
速
度
、
位
置
以
及
位
置
变
量 相 对
于
时 间
或
者
其
他
变
量
的
全
部 高 阶 导 数
,
被
称
为 机
械
臂
运
动 学
[ 1
2
]
。
机
械
臂 的
运
动 学
正
问
题
是
指
在
机
械
臂 关 节 角 度 大 小
己
知
的 前
提
下
,
通
过
计
算
求
得
机
械
臂 末 端 的
位
姿
[
1 3
]
。
2 . 2
机
械
臂 的
连
杆
坐
标
标
定
和
D
-
H
参
数
机械 臂
可
以 看
成
是 由
多 个连 杆 串 联 起 来 的
。
D
-
H
法
是
一
种 由
D
en a
v
i
t
在
上
世
纪
5
0 年
代
提
出
的
一
种 适 合 任
一
一
种 机 械
臂 数 学
建
模 的 方
法
。
D
-
H
法
建
立
连杆
坐
标 系
的
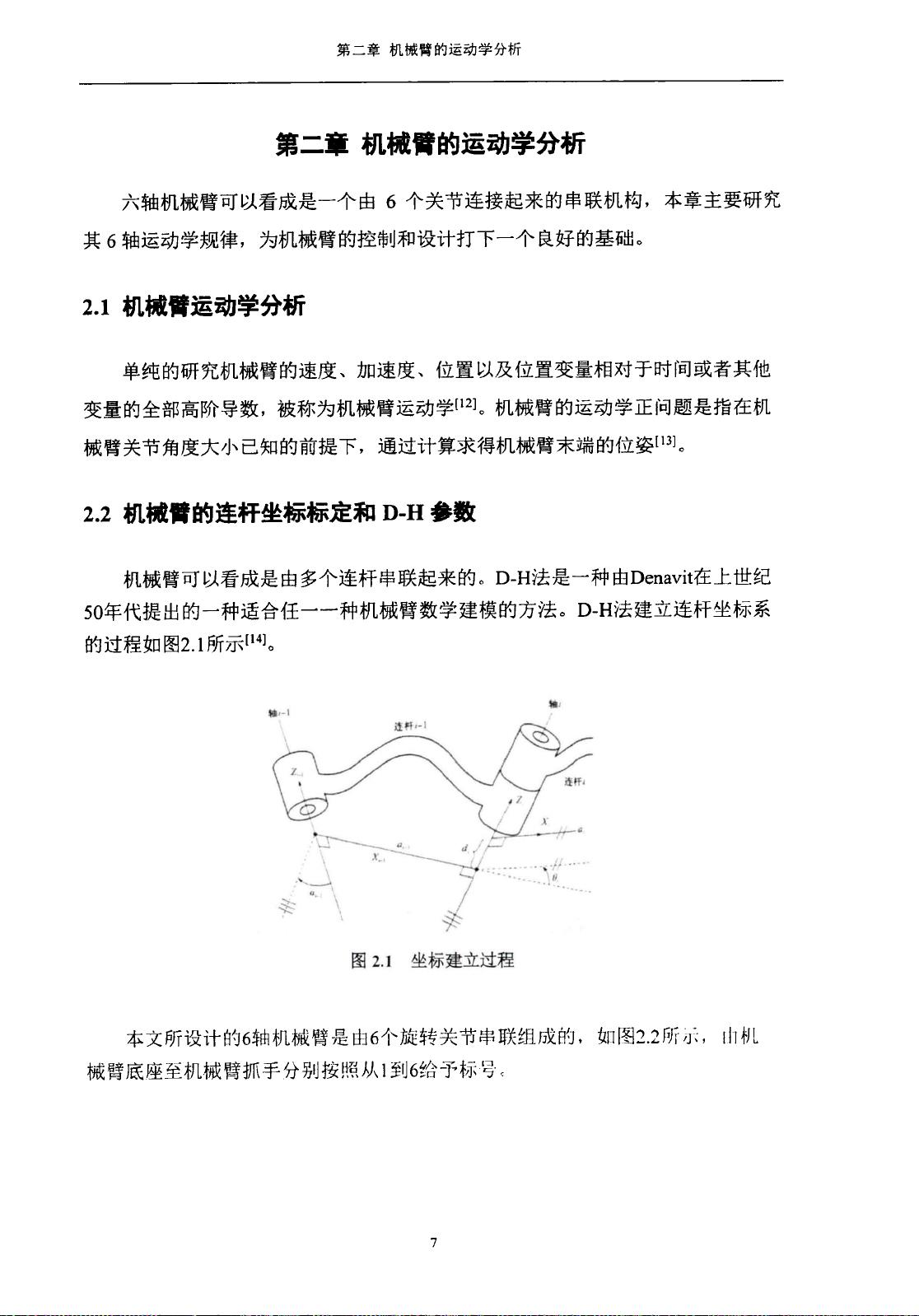
过 程如 图 2
. 1
所
示
[
1
\
图
2 . 1 坐 标
建
立
过
程
本
文
所
设
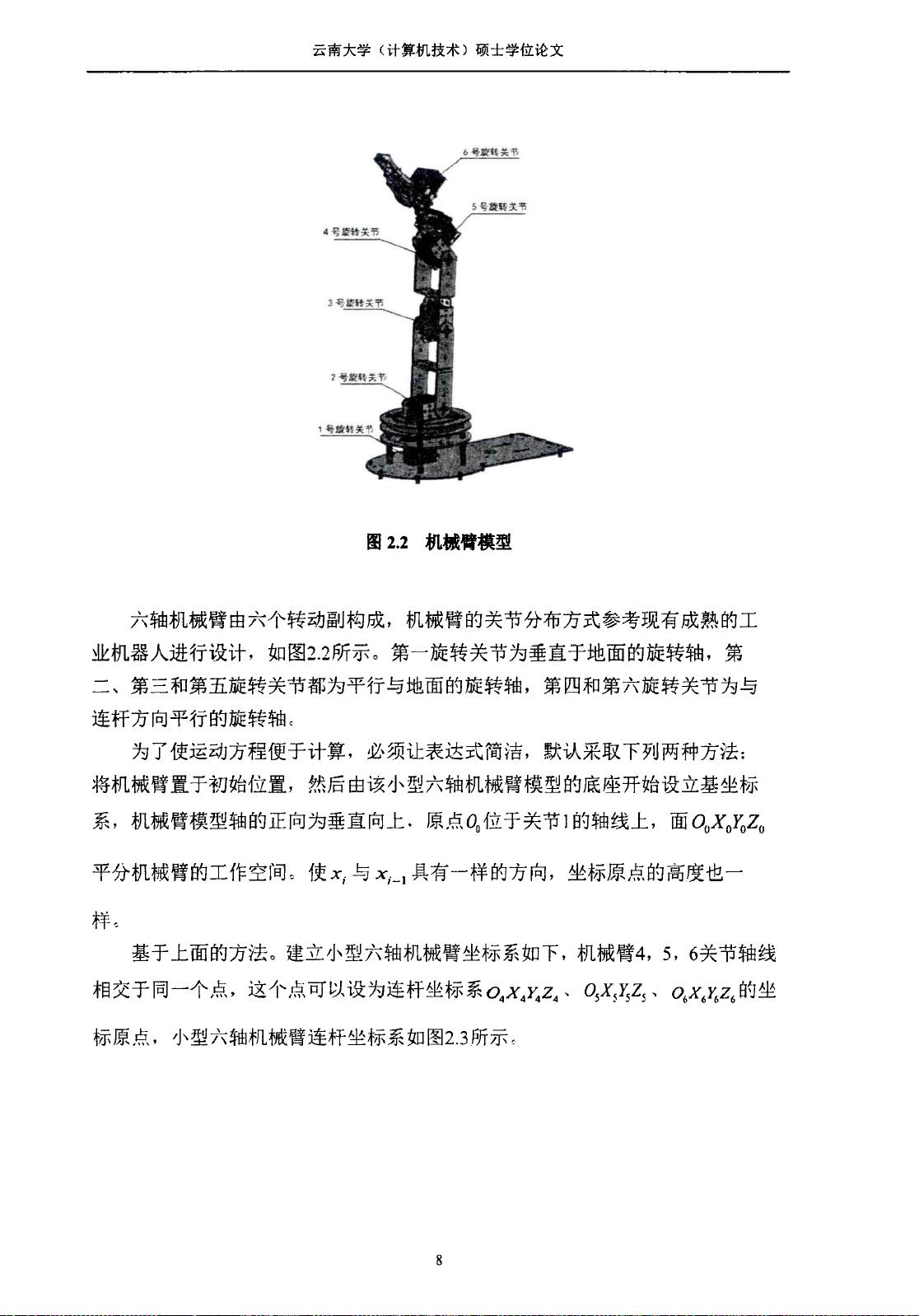
计 的
6
轴 机 械 臂 是 由
6
个 旋 转 关 节 串 联
组
成
的
,
如 图
2 . 2
所
小
'
,
1
1 1
机
械 臂
底 座
至
机械 臂 抓 手 分 别 按 照 从
1
到
6
给
予
标 号
7
剩余72页未读,继续阅读

ohmygodvv
- 粉丝: 507
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
