CAN FD:灵活数据速率的CAN解决方案提升汽车电子性能
CAN FD, 或称为CAN with Flexible Data Rate (CAN FD),是一种扩展了原有CAN总线(Controller Area Network)功能的通信协议,由德国博世公司(Robert Bosch GmbH)在Vector Kongress 2012年大会上提出。CAN FD继承了CAN的许多关键特性,如双线串行通信、非破坏性仲裁、分布式实时控制以及强大的错误检测与处理能力,这些使得CAN FD在保持高可靠性和安全性的同时,显著提升了数据传输带宽和灵活性。
CAN原本是为汽车电子系统设计的,用于实现实时的车辆通信,尤其是在车辆内部各个控制器间的低延迟信息交换。由于其早期的成功应用,例如在纺织机中的控制,CAN迅速在汽车行业和其他工业领域普及。然而,CAN的传统带宽限制(约500kbps)在某些现代应用中显得不足,比如需要实时传输大量传感器数据或者高级驾驶辅助系统(ADAS)的数据。
CAN FD通过引入新的数据传输模式和增强的数据帧结构,提高了数据传输速率。它支持高达8Mbps的传输速度,这是传统CAN的近16倍,极大地提高了数据吞吐量。此外,CAN FD允许使用更长的数据域,使得能够传输更大的数据包,这对于需要处理大量信息的系统来说非常有价值。
在CAN FD的发展历程中,博世公司发挥了关键作用,他们从CAN的开发开始,并推动了标准的制定。ISO 11898标准被扩展来支持CAN FD,确保了其在工业界的广泛接受和互操作性。CAN FD的标准化促进了其在汽车电子、工业自动化以及其他领域的广泛应用,如智能交通系统、工业设备监控等。
使用案例方面,CAN FD的应用主要集中在对实时性和数据量要求高的场合,比如自动驾驶系统中的传感器数据交换、高级安全功能的快速响应,以及工业设备的远程监控和诊断。通过提高数据传输效率,CAN FD可以满足这些系统对于更快决策和更高效通信的需求。
目前,市场上已经有各种支持CAN FD的硬件组件可供选择,包括收发器、控制器和接口芯片,这表明CAN FD已经成为一个成熟的工业标准,得到了硬件制造商的广泛支持。随着技术的进一步发展,我们可以预见CAN FD将在未来继续推动IT行业特别是汽车电子领域的技术创新和应用扩展。
5
AE/EIN | 29/11/2012 | © Robert Bosch GmbH 2012. All rights reserved, also regarding any disposal, exploitation, reproduction, editing,
distribution, as well as in the event of applications for industrial property rights.
CAN FD – CAN with Flexible Data Rate
Automotive Electronics
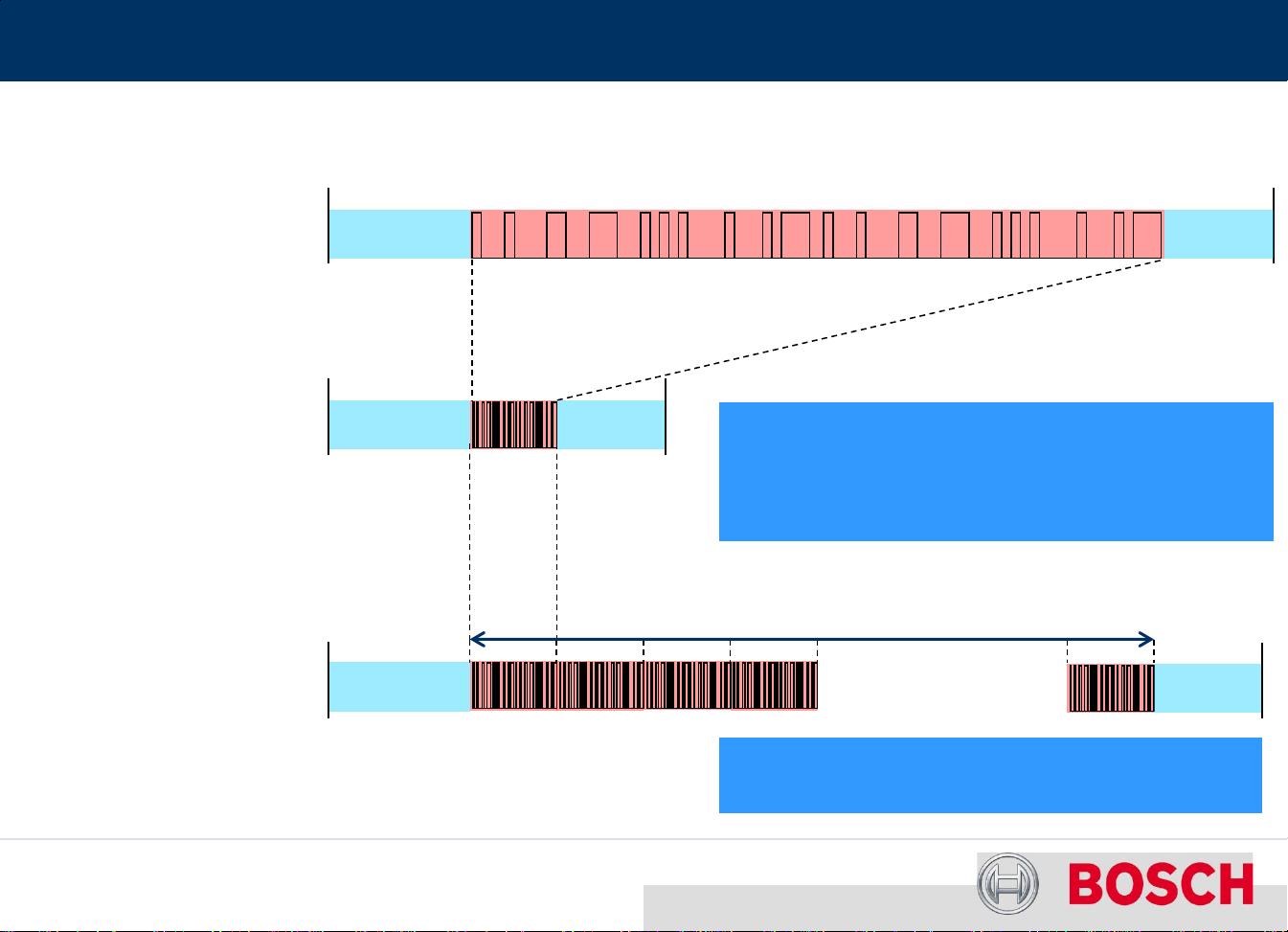
Approaches to increase Data Rate
Payload transmitted at higher bit rate
Arbitration
Phase
Arbitration
Phase
Standard CAN
Frame
Arbitration
Phase
Arbitration
Phase
CAN FD
Frame
Implications of higher bit rate
Changes limited to HW of protocol controller
Transceivers for higher data rate qualified
Legacy SW fully compatible
Implication of larger payload
SW update necessary
.......................
Arbitration
Phase
Arbitration
Phase
1. Increase
Bit Rate
CAN FD
Frame
5
Data
Phase
2. Increase
Payload
up to 64 Bytes payload in Data Phase (instead of 8 Byte)
剩余21页未读,继续阅读
2018-08-17 上传
2019-07-09 上传
2021-08-11 上传
2008-10-31 上传
2021-01-24 上传
2013-01-16 上传
2021-11-13 上传









