现实场景中眼睛定位技术的文献综述
需积分: 5 60 浏览量
更新于2024-07-10
收藏 2.67MB PDF 举报
"这篇研究论文是对现实场景中健壮且高效的眼睛定位技术的文献调查,由南京航空航天大学和南京大学新型软件技术国家重点实验室的研究人员撰写。文章探讨了眼睛定位在人脸识别、注视估计、姿态估计、表情分析等领域的广泛应用,以及由于眼睛在大小、形状、颜色、纹理和环境变化中的高度可变性所带来的挑战。"
在过去三十年中,针对这些挑战,科研人员已经开发出了多种技术。这篇论文旨在对这些算法进行分类和全面评估,重点关注现实场景中的难点和挑战,并提供详尽的分析。眼睛定位是计算机视觉领域的一个关键任务,因为它在多个应用中扮演着重要角色。
首先,眼睛定位在人脸识别中至关重要,因为眼睛通常是识别个体的关键特征。通过精确地定位眼睛,可以提高人脸识别的准确性和鲁棒性,尤其是在光照条件变化、遮挡或部分视图的情况下。
其次,眼睛的位置和运动是人类视觉交流的重要线索,因此,注视估计是理解用户注意力和意图的关键。高效的算法能够实时跟踪眼睛运动,从而在人机交互、虚拟现实和广告等领域提供有价值的信息。
此外,眼睛定位对于姿态估计也十分关键,因为它可以帮助确定头部的方向和位置,这对于自动驾驶车辆、无人机导航或监控系统等安全应用来说必不可少。同时,眼睛的形状和运动模式也是表情分析的重要因素,有助于理解情感状态和人际交往。
论文中,作者将各种眼睛定位算法分为几大类别,可能包括基于几何特征的方法、基于模板匹配的方法、基于机器学习的方法(如支持向量机、深度学习)以及更现代的基于深度神经网络的方法。每种方法都有其优势和局限性,比如基于几何特征的方法可能对光照变化不敏感,但可能无法处理眼睛外观的大幅度变化;而基于深度学习的方法通常能适应更多的变化,但需要大量的训练数据和计算资源。
作者还深入讨论了现实世界中的主要挑战,如遮挡、低光照、高动态范围、快速运动以及面部表情的变化。为了克服这些挑战,研究者们不断寻求改进现有的定位算法,提高它们的鲁棒性和实时性。论文可能会列举并比较各种解决方案的效果,以及在不同环境和条件下各自的性能。
这篇文献调查提供了对眼睛定位领域过去和现在技术的全面概述,为未来的研究指明了方向,同时也为实际应用中选择合适的方法提供了参考。它强调了在复杂现实环境中开发更加稳健和高效算法的必要性,对于进一步推动计算机视觉和相关领域的进步具有重要意义。
Typical methods to measure such patterns include Variance
Projection Function (VPF) and Integral Projection Function (IPF)
[27], both of which are adopted in General Projection Function
(GPF) [114] under a unified architecture for accurate eye localiza-
tion. These projection functions actually estimate the global inten-
sity distribution around the coarse eye region. However, in some
real-world applications, the global intensity distribution might be
deteriorated by noisy light spots of iris. To address this, [65]
proposed to accumulate locally smoothed version of pixel intensity,
which tends to be more stable compared to the global one.
Alternatively, Wang et al. [99] developed a facial landscape
navigation technique for eye localization, in which the interested
intensity pattern (a pit at the eye center surrounded by hillside) is
searched in a 3D terrain surface manifold of the face. In a similar
method, gradient patterns [53] instead of intensity patterns are
calculated around the eye region and served as the template for
eye matching.
2.1.3. Context characteristics
When the shape or intensity characteristics of the eyes cannot
be reliably measured, the context characteristics are very useful for
eye localization. This is because eyes in the face context usually
have stable relationship with other facial features in terms of both
appearance and structure distribution. Therefore, one may exploit
this prior knowledge to locate the positions of the eyes in the
Bayesian framework. For example, Kawato and Ohya [50] proposed
an eye tracking system through quickly localizing the ‘between-
eyes’ region.
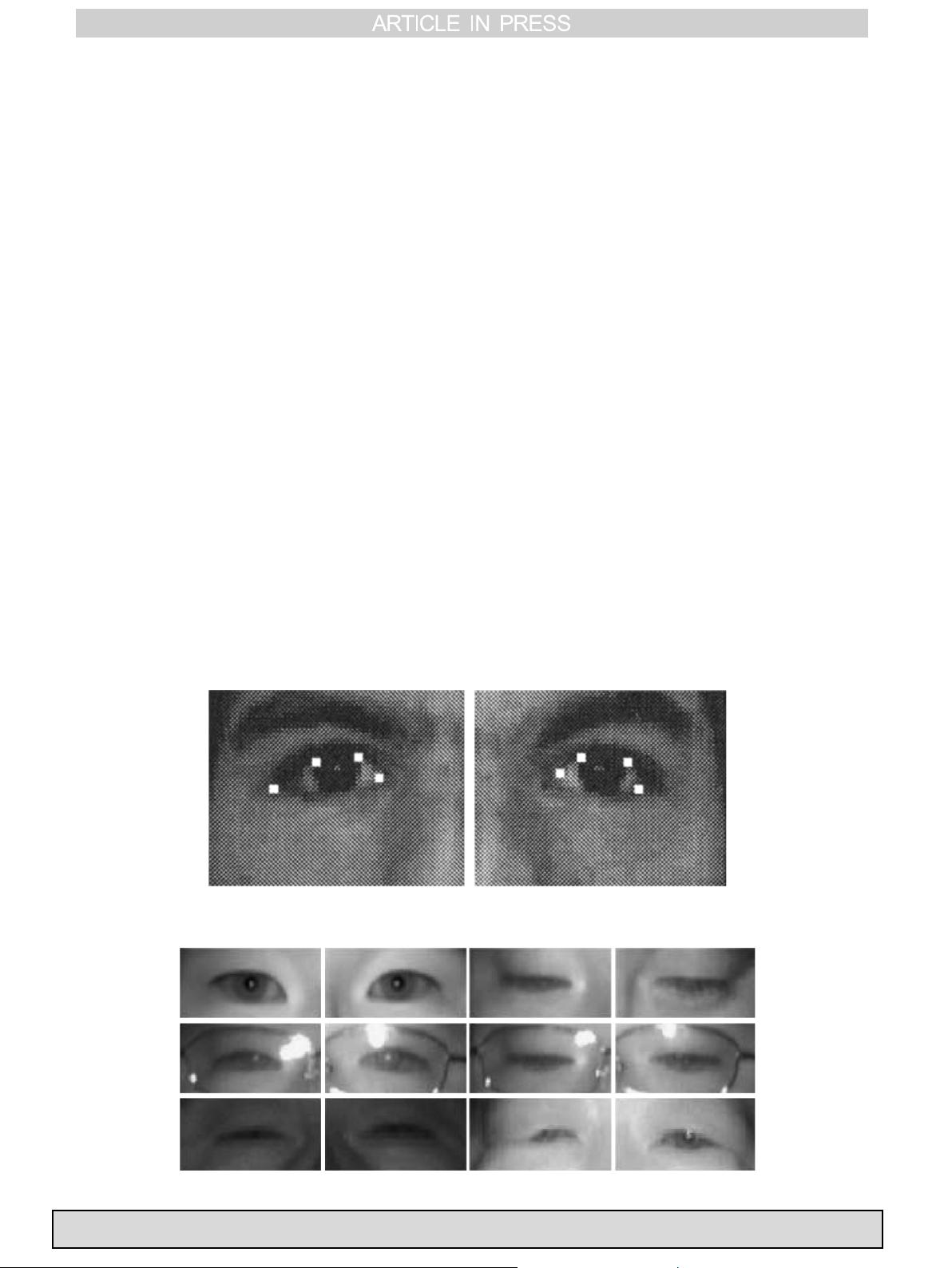
2.1.4. Active infrared lighting characteristics
One of the most effective ways to deal with the lighting
changes is the active near-infrared (NIR) imaging techniques, due
to the fact that under the active IR lighting, the pupil and iris will
show different illumination properties. In particular, the pupil
usually has a larger reflection rate than the iris, resulting in a
bright spot at pupil position. This bright spot is a good indicator of
the pupil and can be used for eye localization [117,116] (cf. Fig. 5).
In practice, a near-infrared light source with a wavelength from
780 to 880 nm will meet the requirements of most in-door
application scenarios. Due to its robustness against visible lighting
changes, this method has been widely used in driver fatigue
detection and face recognition [64]. It should be mentioned,
however, that there exist several conditions (restrictions) that
must be satisfied to ensure good performance, such as opened eye
states and the on-axis light, together with NIR imaging hardware.
Li et al. [64] observed that although active NIR makes the
appearance of the eyes robust to different lighting conditions in
general, the glasses and eye states may cause trouble for precise
eye localization (cf. Fig. 5), and they proposed a tree-structured
detector to carefully address this issue [64].
2.1.5. Discussion
In this section, we summarized several major eye localization
methods which measure different characteristics of eyes, including
the shape, strong intensity contrast, context information, and
active NIR lighting characteristics. It is worth noting that most of
these, except the active NIR technique, are developed at the early
stage of eye localization research and their own limitations
become more pronounced under the complicated uncontrolled
conditions where the characteristics may not be reliably measured
any more. To deal with this problem, most recent eye localization
methods resort to more advanced statistic methods. This is the
main topic of the next section.
2.2. Learning statistical appearance model
In contrast to aforementioned methods where eye-characteristics
with intuitive visual meanings are measured, methods reviewed in
Fig. 4. Corners located for eyes [58].
Fig. 5. Eyes examples under active near-infrared lights [64].
F. Song et al. / Pattern Recognition ∎ (∎∎∎∎) ∎∎∎–∎∎∎4
Please cite this article as: F. Song, et al., A literature survey on robust and efficient eye localization in real-life scenarios, Pattern
Recognition (2013), http://dx.doi.org/10.1016/j.patcog.2013.05.0 09i
剩余16页未读,继续阅读
2024-02-08 上传
2019-11-13 上传
2021-05-23 上传
2021-02-03 上传
2021-05-26 上传
2021-10-09 上传
2021-05-02 上传
2021-09-19 上传
2021-03-10 上传

weixin_38673738
- 粉丝: 2
- 资源: 914
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
