理解机器视觉:海康VisionMaster在对位贴合项目的相机映射
"小杨通过CAD软件和海康威视的VisionMaster视觉算法平台,讨论了在实际生产中,如何处理机械手从一个工位抓取物体到另一个工位进行贴合时的相机映射与对位问题。由于在工位二不便进行标定,通常在工位一进行标定后,利用两点或四点映射将工位二相机坐标映射到工位一的相机坐标。在模拟过程中,机械手、工位一相机、工位二相机的坐标系通过旋转调整角度,例如相机1和相机2相对于机械手坐标系的X轴有10°和45°的夹角。为了简化,单像素精度按1:1处理。此外,通过12点标定处理机械手末端吸盘与中心不共轴的情况,模拟吸盘吸附标定板在相机视野内的平移和旋转,最终使用海康的算法平台进行坐标转换。"
在工业自动化领域,机器视觉扮演着至关重要的角色,尤其在对位贴合工艺中。海康威视的VisionMaster算法平台是一个强大工具,它提供了丰富的视觉算法,用于图像处理和坐标转换。在本项目中,小杨探讨了如何在没有实际设备的情况下,通过理论和模拟来理解相机映射和对位贴合的原理。
首先,他指出,当机械手需要从一个工位移动物体到另一个工位时,如果第二个工位无法进行相机标定,可以在第一个工位完成标定过程。标定完成后,通过两点或四点映射方法,将工位二相机的坐标转换到工位一相机的坐标系统中,实现坐标系间的匹配。这种映射技术确保了即使在不同的工位,物体的位置信息也能准确无误地传递,从而保证贴合的精度。
在模拟实验中,小杨考虑了不同坐标系之间的相对位置关系,例如通过旋转来调整相机与机械手坐标系的夹角。他假设了相机1和相机2相对于机械手坐标系的X轴有特定的夹角,这是实际应用中可能遇到的情况。
接着,为了模拟不共轴情况,小杨使用了12点标定法来确定旋转中心,这是一种常见的方法,用于解决实际应用中机械手末端吸盘与中心不一致的问题。通过吸盘吸附带有MARK点的标定板,在相机视野内进行多角度、多位置的移动,收集数据,进而计算出旋转中心和坐标关系。
在进行坐标转换时,海康的算法平台提供了一种相对坐标系的处理方式,即以平移路径中的某个点作为基准,这样可以简化坐标计算,提高效率。同时,通过模板匹配找到标定板上Mark点的中心,进一步获取像素坐标。
小杨的分析揭示了机器视觉在实际生产中解决复杂对位问题的关键步骤,包括相机标定、坐标映射、旋转中心计算以及使用视觉算法平台进行坐标转换。这种方法不仅有助于理解和学习机器视觉的理论,也为实际工程应用提供了参考。
小杨说事小杨说事-基于海康机器视觉算法平台的对位贴合项目个人理解基于海康机器视觉算法平台的对位贴合项目个人理解
都说“纸上得来终觉浅,绝知此事要躬行”,可惜咱没这条件呀,没项目咱也不能干坐着呀,那咱发挥主观能动性,咱不是学机械的么,还好还记得一点CAD的知识,今天小杨说事,
咱就“纸上谈兵”,用CAD结合公司的视觉算法平台VisionMaster来说说相机映射和对位贴合的事,如果有错误的地方,还请各位自动化前辈多多指教,毕竟网上的关于这个知识太少
了。
实际的生产过程中,我们常常会碰到这样的情况,机械手从工位一吸着对象到工位二进行贴合,但是工位二我们不方便执行标定,通常的做法是在工位一执行一次标定流程,然后
使用两点映射或者四点映射把工位二的相机坐标映射到工位一的相机一中。说起来很轻松,咱没实战过呀,但是咱可以模拟呀,说干就干,咱开始动手吧。
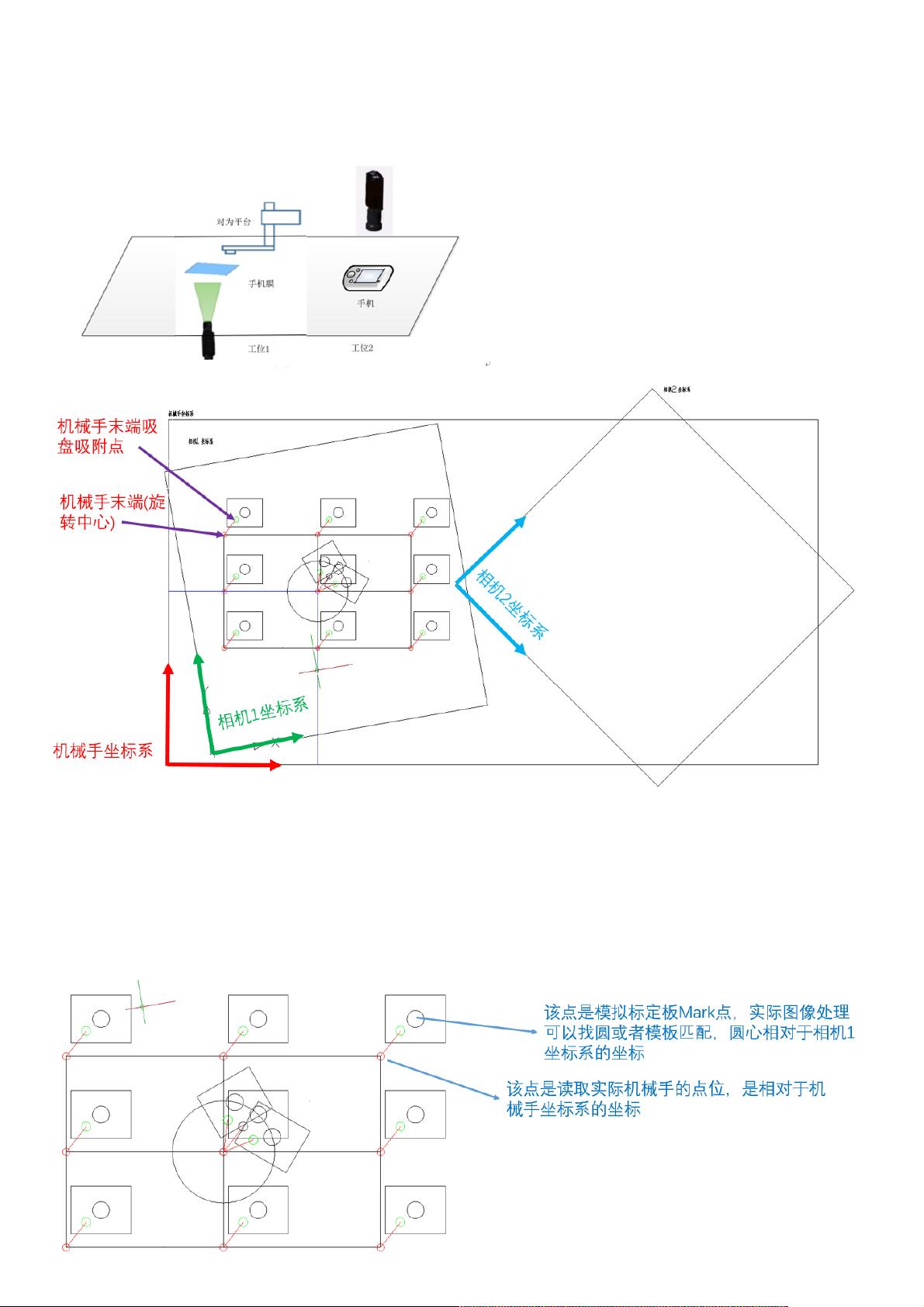
如上图所示,咱们为了验证一般性,把机械手坐标系,工位一的相机1坐标系,工位二的相机2坐标系画的夸张一些,但是在CAD图上我们是通过旋转的方式来改变两个相机的坐标
系和机械手坐标系的夹角的,事先是知道相机1坐标系X轴和相机2坐标系X轴和机械手坐标系X轴的夹角分别是10°和45°。当然关于单像素精度,这里是采用一比一的方式,因为现
实成像比这个更复杂,为了方便描述而已,不影响咱的用户体验。
现实场景中,咱一般碰到的都是机械手末端吸盘和末端中心不共轴的情况,那这边咱就选用最通用的12点标定来求出这个旋转中心,啥,你不知道什么是不共轴,啥是旋转中心,
那你out了,赶紧看看这个博主的博客,人家讲的很详细,地址如下:
https://blog.csdn.net/KayChanGEEK/article/details/73878994
看完了那咱继续,吸盘吸着带MARK点的标定板,在相机视野里面平移9次,旋转3次,当然尽量贴近实际对象所在的平面,移动范围尽量覆盖实际对象可能出现的范围。以X方向每
次平移640.3044,Y方向每次平移389.3736,角度每次旋转30°,使用海康的算法平台呢,咱一般使用相对坐标系,尽量不使用绝对坐标系。咱一般是以平移的第5点作为基准哈,
所以有了下图的12点的关系以及在CAD里面的坐标数据,机械手的绝对坐标是可以从机械手的示教器读出来的,相对坐标呢,都是相对第5点的坐标哈,至于像素坐标,这里咱取的
是标定板上的那个圆Mark点的圆心,这个使用一个模板匹配,位置修正,圆查找工具就完事哈。
下载后可阅读完整内容,剩余4页未读,立即下载
2021-10-18 上传
2024-11-03 上传
2021-09-15 上传
2024-11-03 上传
2023-11-06 上传

weixin_38722329
- 粉丝: 12
- 资源: 960
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Matlab/ Simulink 的雷达系统仿真
- 电子商务论文(chiana-pub与华储网的对比分析)
- 数据库设计漫谈-数据库的规范与技巧
- MIMO雷达正交频分LFM信号设计及性能分析
- IE注册表设置安全项
- matlab builder for dotnet User's Guide
- Maven权威指南中文版.pdf
- Linux0从硬盘安装Linux
- at89s52中文资料
- 程序员的SQL金典,从入门到精通
- GridView的相关技术
- 一片关于用OPNET无线建模的文章
- 三层交换机配置实例里面含有代码
- SQL语句基本语法 sql语句的基本语法
- js面向对象高级编程-电子书(pdf格式)
- Unix toolbox
