智能小车控制器:红外循迹与超声波避障设计
版权申诉
21 浏览量
更新于2024-06-21
收藏 2.22MB DOCX 举报
本研究文档聚焦于"带摄像头和GPS的自行小车控制器设计",主要探讨的是一个智能小车的单片机控制系统,它结合了先进的感知技术,如红外避障和黑线循迹,以及超声波测距功能。核心目标是设计一个能够在复杂环境中自主行驶的小车,通过集成摄像头和GPS定位,实现精确导航和障碍物检测。
1. **核心控制系统**:
- 系统采用单片机作为核心控制器,负责整个小车的逻辑处理和决策。
- **红外避障**:四个红外探测头被用于感知前方路径,它们利用黑色表面对红外光反射率低的特性,通过检测光线反射来判断是否存在障碍物。当光线被反射,传感器检测到低电平信号,从而触发避障动作。
- **黑线循迹**:小车能识别预设的黑线轨迹,利用不同颜色对光线的吸收差异,使得在黑线上行驶时,红外传感器能够准确地识别并跟踪路径。
2. **超声波测距与避障**:
- 除了红外检测,还引入了超声波测距技术,通过在控制端发射高电平信号,然后接收返回的高电平信号,计算出小车与障碍物之间的距离,进一步优化避障策略。
3. **技术发展与挑战**:
- **国内外研究进展**:概述了该领域的发展历史,包括国内外在智能小车控制方面的研究成果和技术趋势,以及当前存在的问题和改进空间。
- **主要解决的问题**:设计着重解决的问题可能包括提高避障精度、提升路径规划算法、实时性以及环境适应性等,以实现更稳定和高效的自主行驶。
4. **技术要求与应用前景**:
- **设计目的与意义**:阐述设计的目的,是为了提升小车的智能化水平,提高其在特定任务(如仓储、物流、教育等领域)中的应用效能。
- **实际应用**:讨论了这种带有摄像头和GPS的控制器在无人驾驶、自动导航和机器人领域的潜在应用,以及可能带来的社会经济效益。
本设计旨在构建一个具备智能感知和自主导航能力的自行小车,通过结合多种传感器技术和高级定位系统,以实现高效、安全的运行,具有较高的实用性和科研价值。
北京理工大学珠海学院 2020 届本科生毕业设计
北京理工大学珠海学院 2020 届本科生毕业设计
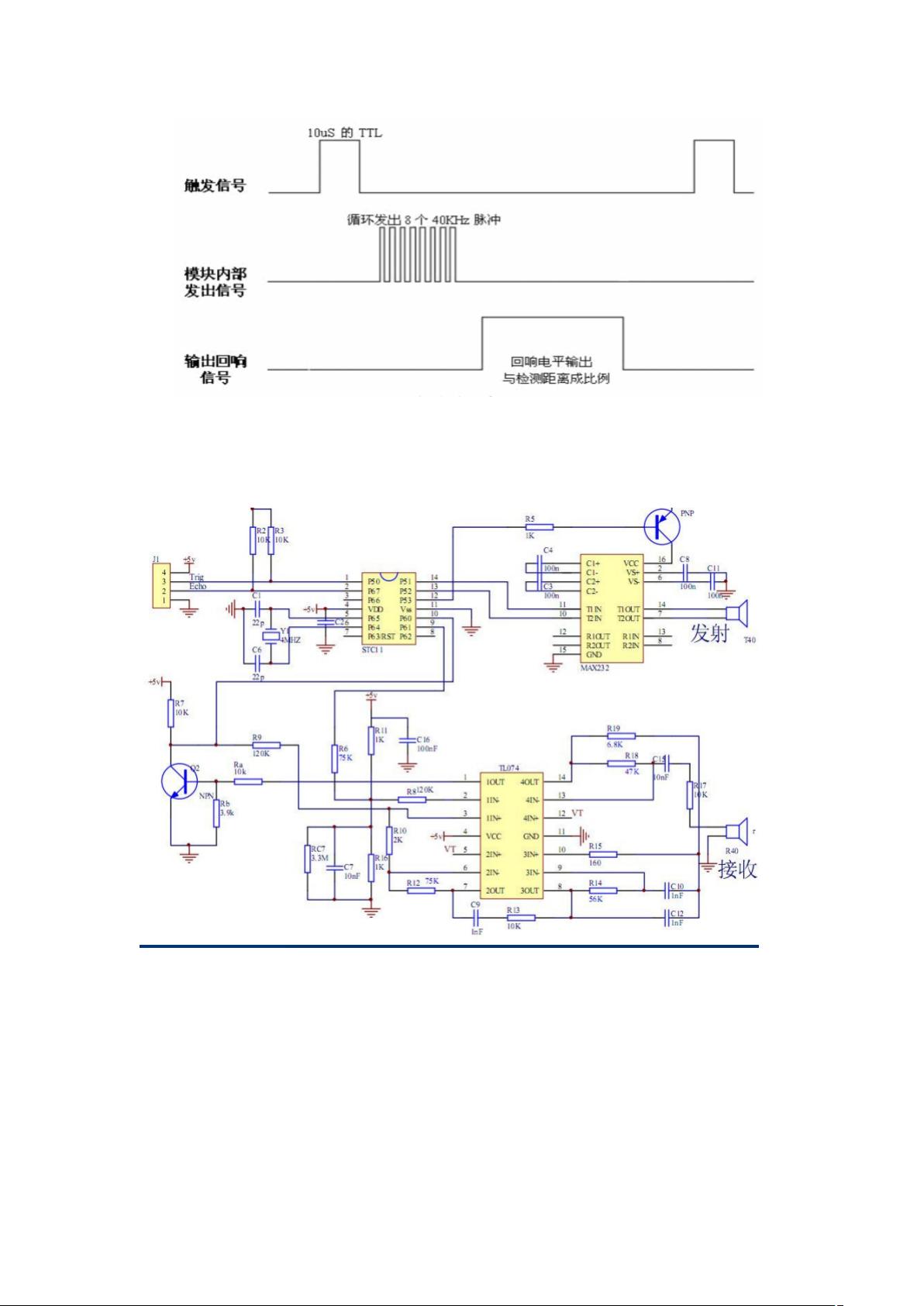
图 2.8 超声波时序图
电路原理图:
图 2.9 发射接收电路
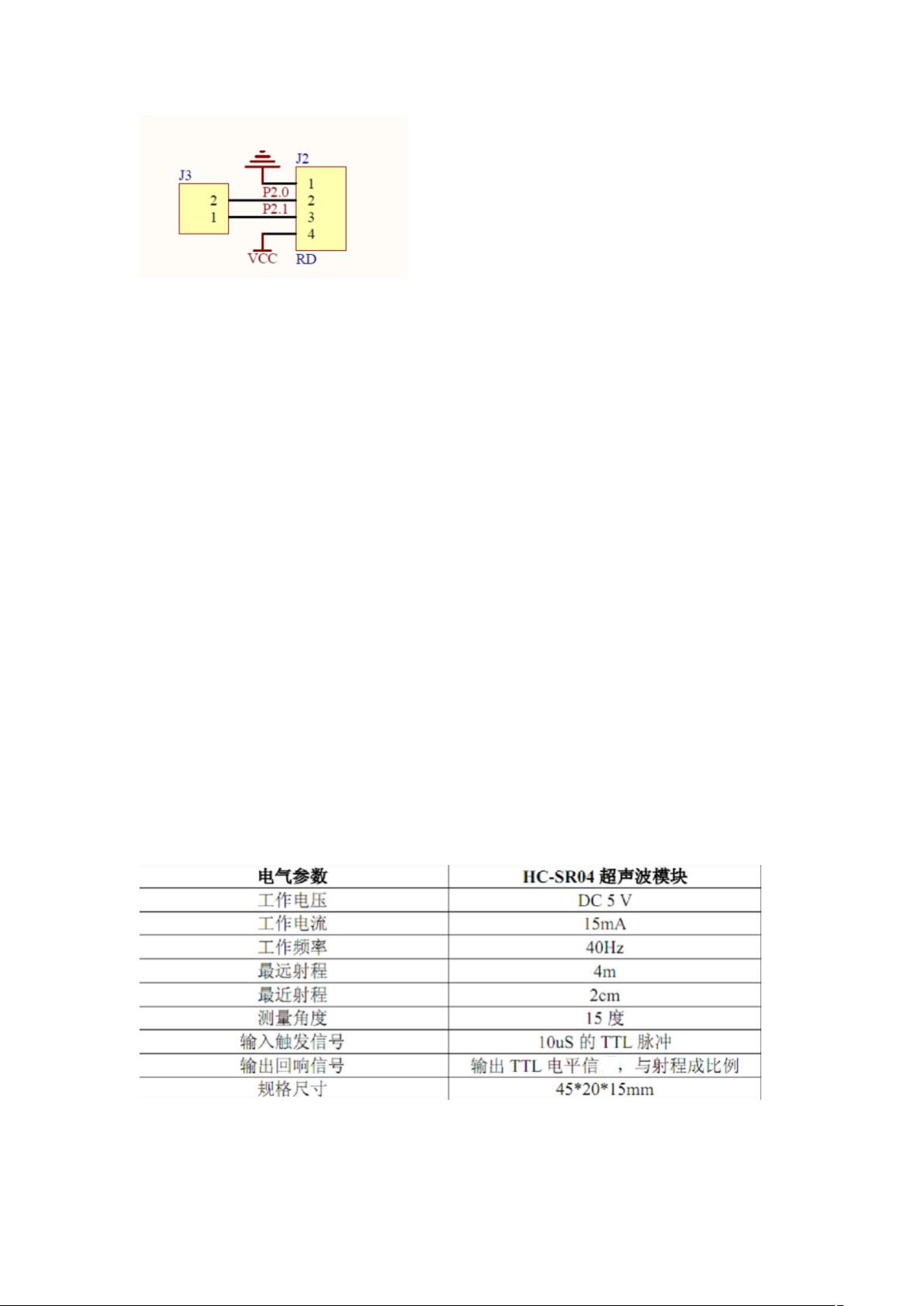
如图下图 3.0 IO 口:与单片机 IO 口相连,一个是 P2.0,一个是
P2.1,直接接线到开发板,其中 P2.0 是 Echo 也就是接收端,接收端
P2.1 是指持续接收到高电平,通过高电平时间来判断超声波的运行时
间,就是控制端,控制端是发送 10US 的信号让它控制。

剩余66页未读,继续阅读
2022-07-01 上传
2023-04-05 上传
2022-10-15 上传

南抖北快东卫
- 粉丝: 84
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 响应式汽车销售租赁机构网站静态模板.zip
- 一次性资源
- frontend-blog
- IPC1A_2S_201313940
- amewaregroup-task:具有2种形式的简单React.js Web应用程序
- topcoder:topcoder问题
- 响应式汽车零配件类企业前端cms模板下载.zip
- 常用材料重量计算.zip
- 5种国产arm芯片(对标stm32f103c)数据手册
- TinyURL PHP Script-开源
- UnicaBot2.0
- nest-financial-planning
- gerry0002.hithub.io
- read-font-cmap:解析TrueTypeOpenType字体文件的CMap
- Borland-Delphi-7-Studio-Enterprise
- Hackintool349.zip
