IEEE 1588协议:嵌入式处理器的精密时钟同步详解
需积分: 10 154 浏览量
更新于2024-09-09
收藏 524KB PDF 举报
IEEE 1588.pdf 是一篇关于精密时钟同步的深入研究文章,发表在2009年11月的《模拟对话》期刊上。本文作者江武和罗伯特·佩洛金探讨了如何利用 IEEE 1588 协议对网络中的分布式时钟进行精确同步,特别是在测试与测量、电信通信和多媒体流等领域中。该标准在2002年发布,随后在2008年的更新版本中进行了增强,以适应更广泛的应用需求。
IEEE 1588,也称为PTP (Precision Time Protocol),是一种网络协议,旨在提供低成本、支持异构系统且能达到纳秒级精度的时间同步。这种标准化方法对于需要高度时间一致性应用的重要性日益增加,如工业自动化、数据中心监控和金融交易系统等。
文章重点介绍了原版 IEEE 1588-2002 标准的基本原理和操作流程,以及其升级版本 IEEE 1588-2008 所带来的改进。其中特别强调了 ADSP-BF5181 Blackfin嵌入式处理器针对 IEEE 1588 的硬件支持。这款处理器集成了专用的 IEEE 1588 功能,使得在实时系统中实现精确时钟同步成为可能。
文章接着给出了一个具体的实例,通过 ADSP-BF5181 解决方案展示了实际应用中所获得的时钟同步性能结果。这包括同步精度、延迟测量以及在高吞吐量网络环境中的稳定性测试。这些实验数据和案例分析为读者提供了对如何在实际工程环境中实施和优化 IEEE 1588 系统的宝贵参考。
这篇文章不仅介绍了 IEEE 1588 技术的核心概念,还提供了实用的技术指南和实践经验,对于那些寻求在嵌入式系统中采用精确时钟同步的工程师和技术人员来说是一份有价值的参考资料。理解并掌握这个标准和实施策略,能够帮助他们在设计高性能、低延迟的系统时,确保关键任务的时间同步性能。
Analog Dialogue 43-11, November (2009) 1
Synchronizing Device Clocks
Using IEEE 1588 and Blackn
Embedded Processors
By Jiang Wu and Robert Peloquin
Introduction
The IEEE 1588 standard, introduced in 2002, denes a protocol
to synchronize distributed clocks on a network. It is becoming
the preferred clock synchronization method for many different
applications, including test and measurement, telecommunications,
and multimedia streaming. This standardized method for
synchronizing clocks is cost-effective, supports heterogeneous
systems, and provides nanosecond-level synchronization precision.
This article provides an introduction to both the original IEEE
1588-2002 standard and the enhancements incorporated as part
of the updated IEEE 1588-2008 version. Dedicated hardware
support for IEEE 1588 has been integrated into the ADSP-BF518
1
Blackfin
®
embedded processor because of the increasing
importance of IEEE 1588 in some of its targeted applications. An
overview of its capabilities is provided, followed by an example
showing clock synchronization performance results obtained by
an ADSP-BF518 processor solution.
What Time Is It?
It is common for a system to need to maintain its own sense of time
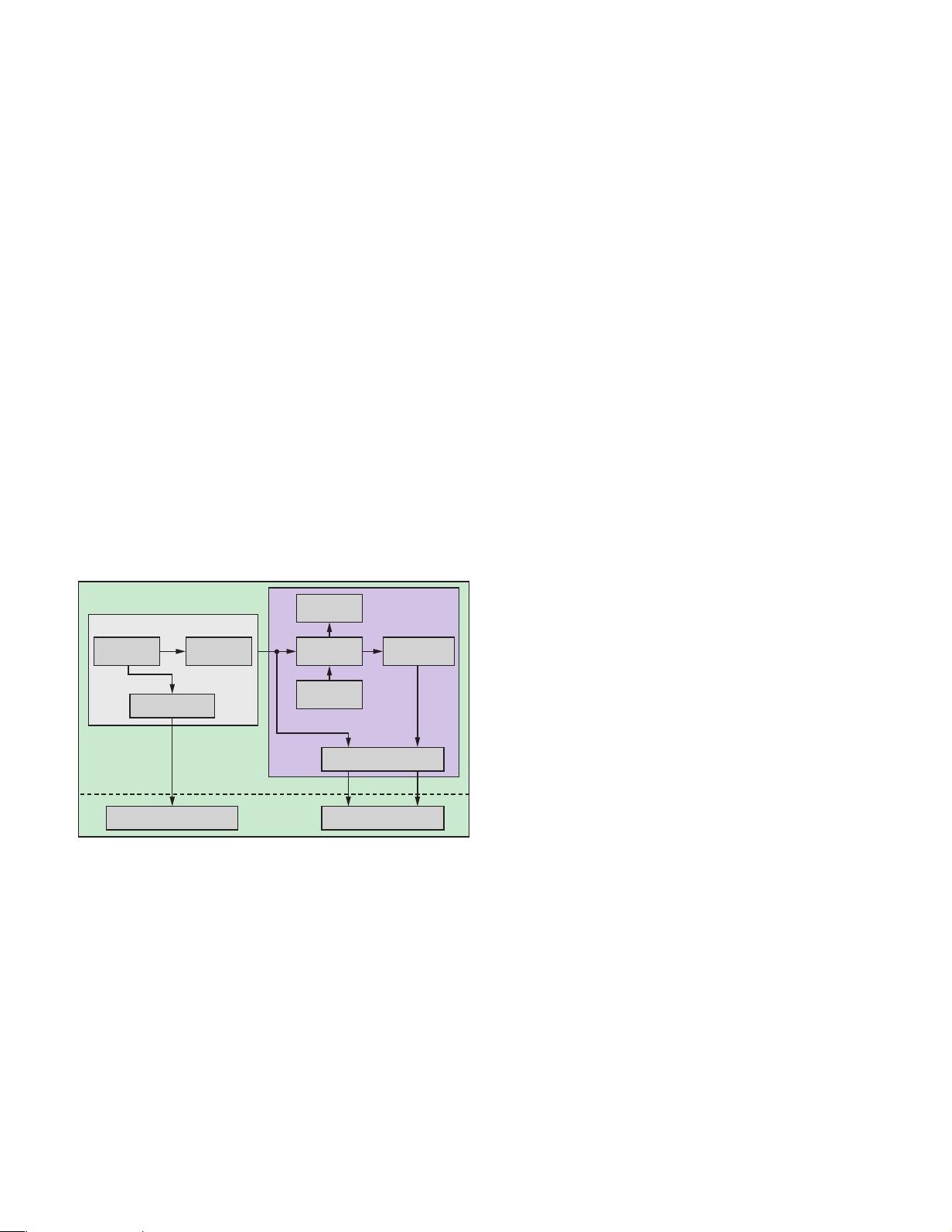
using a local oscillator. Figure 1 shows how hardware and software
combine to generate time information within a system.
SOFTWARE
APPLICATION HARDWARE
CLOCK OUTPUT
LOCAL TIME SYSTEM
NUMBER OF
PULSES
H:M:S TIME
APPLICATION
DIVIDER
COUNTEROSCILLATOR
FREQUENCY
CONVERSION
TIME
HOUR:MIN:SEC
EPOCH
HARDWARE
APPLICATION SOFTWARE
API FUNCTIONS
Figure 1. Local timekeeping.
This time information can be used by both hardware and software
resources within the system. In hardware, one or more physical
clock signals (clock outputs) are derived from the oscillator’s clock
and can be used to drive or trigger other parts of the system. The
time maintained in software is typically referred to as system time.
The system time can be represented in the form of numbers of clock
pulses or in second/nanosecond notation. The system software
derives the time from the number of oscillator clock pulses and
its frequency information, and provides application-programming-
interface (API) functions that other parts of the software use to
retrieve and set the time. If an absolute time is desired, the provided
time is associated with a predened epoch, which identies a
reference point in time.
Synchronize Your Watches
Many applications require two independent devices to operate in
a synchronized fashion. If each device were to rely solely on its
own oscillator, differences between the specic characteristics
www.analog.com/analogdialogue
and operating conditions of the individual oscillators would limit
the ability of the clocks to operate synchronously. Some possible
simplistic solutions to address these limitations include:
• All the devices could use a single physical oscillator. This is only feasible
for distributed systems in close proximity; a high-frequency clock
signal cannot be reliably delivered over a long distance.
• All the devices could utilize oscillators with nearly identical
characteristics. This approach is impractical due to the difculty
of acquiring nearly identical oscillators and keeping them from
drifting apart over time. More importantly, each oscillator will
be subjected to different operating conditions.
• If all the devices are interconnected via a communications network
such as Ethernet, they can dynamically adjust their individual clocks
to a single “master” clock by exchanging time messages over the
network. With network time protocol (NTP), the traditional time
synchronization protocol, every device in the system adjusts
its clock according to the time information it retrieves from
an NTP time server. However, this protocol can only achieve
synchronization accuracy on the order of milliseconds.
IEEE 1588 denes a newer protocol capable of nanosecond
synchronization accuracy. How it can achieve this level of clock
synchronization is discussed in the following sections.
What IEEE 1588 Does
The IEEE 1588 standard denes a protocol for time-synchronizing
devices that are geographically dispersed but interconnected by
some form of communications technology, for example, Ethernet.
By exchanging timing messages between devices they can maintain
the same absolute system time, which is represented in seconds
and nanoseconds.
An intuitive way to achieve this goal is for one device, which has
the “best” (most accurate) clock, and is designated as the master-
clock device, to broadcast its time to the other devices. The other
dev ices will adjust their times to match t he t ime sent by t he master
clock. This solution has several limitations, though:
1. The master-clock device cannot broadcast the time at
innitesimal intervals, so the “slave” clock devices have to use
their own independent and “inferior” oscillators to interpolate
the time points between two broadcasts from the master-clock
device. This results in degraded synchronization during the
time between updates from the master clock.
2. Delays inevitably exist on the broadcast path, with magnitudes
depending on the communications technology—the time that
a physical signal takes to travel along a wire from one device to
another, for example. This delay results in an additional offset
between the master clock and each slave clock.
3. Differences among the broadcast paths between the master-
clock device and each slave-clock device will further degrade
the synchronization between individual slave-clock devices.
IEEE 1588 species a protocol that solves the second and third
problems by measuring path delay. It also allows the slave clock
to be adjusted to match the master clock’s pace so as to mitigate
the rst problem. Where possible, the rst problem can be
further reduced by using smaller broadcasting intervals and
higher-quality oscillators.
How IEEE 1588 Measures Communication Delay
IEEE 1588-2002
2
defines four messages to measure the
communication delay of the forward (master to slave) and
backward (slave to master) paths: Sync, Followup, DelayReq, and
DelayResp. The newer version, IEEE 1588-2008,
3
prov ides further
mechanisms to measure the peer-to-peer delay with three additional
messages: PdelayReq, PdelayResp, and PdelayRespFollowup.
下载后可阅读完整内容,剩余4页未读,立即下载
922 浏览量
620 浏览量
1019 浏览量
188 浏览量
2013-04-18 上传
376 浏览量
920 浏览量


mn0523
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
