ROS中URDF详解:构建机器人模型的必备知识
需积分: 9 188 浏览量
更新于2024-07-17
收藏 340KB PDF 举报
在ROS(Robot Operating System)中,URDF(Unified Robot Description Format)是一种广泛使用的标准格式,用于描述机器人的几何结构、关节、运动学以及基本物理属性。本文将深入探讨URDF的概念、基本用法和高级特性,以帮助理解和创建有效的机器人模型。
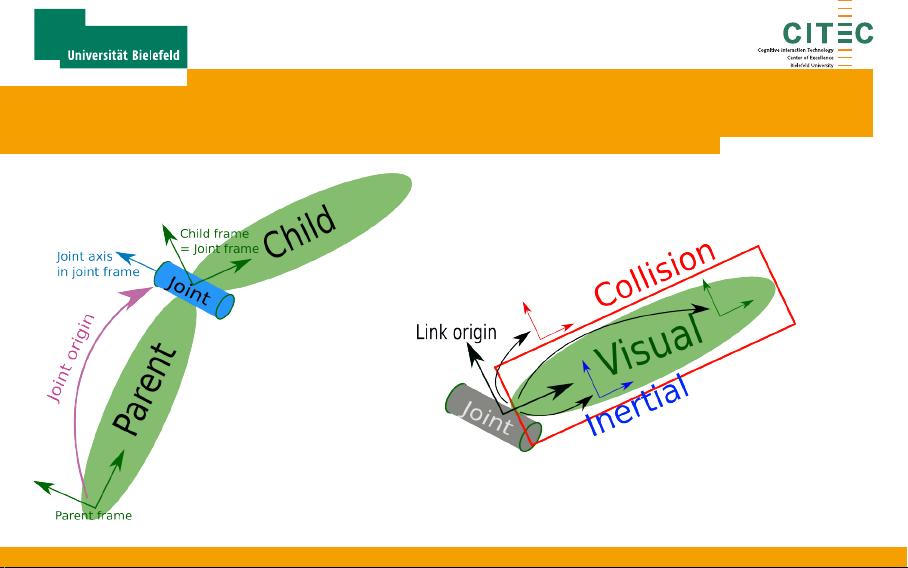
首先,URDF是一个XML格式的文件,它定义了机器人的全局结构,包括链接(link)和关节(joint),以及它们之间的关系。链接代表机械结构的基本单元,而关节定义了它们如何连接和移动。URDF中的元素顺序并不重要,因为它是基于树状结构的,类似于构建机器人的物理模型。
链接的表示包括一个命名空间(name),其下可以有视觉描述(visual)部分,用于表示部件的外观,如几何形状(box, cylinder, sphere 或 mesh)、材质(material)等。每个链接都拥有自己的参考坐标系,通常位于底部,并且与关节的参考坐标系正交。添加尺寸信息时,会用到origin标签,它定义了关节相对于其父关节的位置(xyz坐标)和旋转(rpy,绕固定轴的旋转角度)。
对于关节(joint),除了位置和旋转,还包括关节类型(如固定、连续、旋转或球形关节)和可能的运动限制。关节的定义有助于描述关节如何影响链接之间的运动和约束。
高级使用方面,URDF允许用户定义复杂的动力学模型,包括质量分布、摩擦力和刚体特性。此外,XACRO(eXtensible ASCII Control Robot Description)是URDF的一种扩展,它允许在单独的XML文件中定义和包含多个URDF模型,便于管理和复用。
理解URDF的关键在于掌握其概念基础,熟练应用语法,并能够根据实际需求调整和扩展模型。在实际的ROS项目中,创建和维护一个清晰的URDF文件有助于机器人软件的开发和部署,确保机器人行为的准确性和可预测性。
URDF是ROS中至关重要的一个组件,掌握它的用法有助于在构建机器人系统时实现精确的几何描述和运动规划。通过遵循右手坐标系的规则,理解链接、关节和origin的作用,开发者可以创建出符合预期功能的复杂机器人模型。
剩余24页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-02-13 上传
2013-05-07 上传
2022-07-15 上传
2021-05-09 上传
2021-02-04 上传
2023-05-30 上传

可爱的芒果酱
- 粉丝: 48
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
