单目相机测距与车辆俯仰角精密估算
需积分: 50 94 浏览量
更新于2024-09-03
2
收藏 1.67MB PDF 举报
本文主要探讨了如何利用车辆搭载的单目相机实现高级驾驶辅助系统(Advanced Driver Assistance System, ADAS)中的可靠距离测量,其中关键环节是精确的俯仰角(pitch angle)估计。作者Li、Boa、Zhang和Sato针对这一问题提出了一个创新方法,其核心在于设计一种不会累积误差的俯仰角估计算法,并且在单目视觉条件下能同时估计初始俯仰角。
首先,文章强调了准确的俯仰角对于ADAS功能的重要性,比如在自动驾驶、避障和路径规划等方面。传统的单目视觉技术往往面临挑战,因为它们容易受到环境变化、光照条件和运动模糊等因素的影响,这可能导致俯仰角估计的累积误差。
为了克服这些挑战,作者采用了Harris角点检测算法来识别单目相机视频序列中特征点的运动。这种算法通过对图像局部区域进行梯度分析,找到兴趣点,从而追踪物体在连续帧之间的运动。接着,金字塔Lucas-Kanade方法被用来进一步提高光学流(optical flow)的估计精度,这是一种估算像素级运动的方法,能够有效地捕捉到特征点随时间的变化。
通过结构光运动(Structure from Motion, SfM)原理,结合光学流的结果,研究人员能够推断出相机自身的运动,包括平移和旋转。这些运动参数对于俯仰角的计算至关重要,因为它们反映了摄像头相对于地面的倾斜情况。通过解析相机的旋转矩阵,可以提取出俯仰角(pitch angle)以及其变化率(pitch angle rate),从而实现动态的俯仰角估计。
值得注意的是,这种方法的优势在于其非累积性,即在估计过程中减少了由于长时间数据融合导致的误差累积问题。这对于实时ADAS应用来说是非常关键的,因为它确保了系统的稳定性和准确性。此外,由于仅依赖单目相机,该方法简化了硬件需求,降低了系统成本。
总结起来,这篇研究提供了一种有效的方法,通过单目视觉技术来精确估计车辆俯仰角,这对于提升ADAS性能和安全性具有重要意义。其核心技术包括角点检测、光学流估计和结构光运动模型,这些都构成了俯仰角估计的核心组成部分。
PITCH ANGLE ESTIMATION USING A VEHICLE-MOUNTED MONOCULAR CAMERA FOR
RANGE MEASUREMENT
Li, Bo
a
, Zhang, Xiaolin
b
, Sato, Makoto
c
Department of Information Processing, Tokyo Institute of Technology, Tokyo, Japan
Shanghai Institute of Microsystem And Information Technology, Chinese Academy of sciences, Shanghai, China
Precision and Intelligence Laboratory, Tokyo Institute of Technology, Tokyo, Japan
snakeie@gmail.com, xlzhang@mail.sim.ac.cn, msato@pi.titech.ac.jp
ABSTRACT
To achieve a usable range measurement feature using a
Vehicle-Mounted monocular camera for ADAS (Advantage
Drive Assist System), a pitch angle estimation with high
accuracy is required. We propose a method for estimating
pitch angle with a non-occurrence of cumulative error, and the
initial pitch angle can be estimated simultaneously with only a
Vehicle-Mounted monocular camera. We use the Harris-
corner algorithm and the pyramid Lucas-Kanade method to
detect the optical flow of feature points between adjacent
frames from the monocular camera. With the result of the
optical flow detection using Structure from Motion method to
estimate the camera ego-motion parameters, including the
rotation matrix and the translation vector, and to optimize the
estimated ego-motion parameters using the Gauss-Newton
method. In addition, we propose a method of estimating pitch
angle relative to the road surface from the translation vector.
The pitch angle and the pitch angle rate decomposed from the
rotation matrix of the adjacent frames are composed using an
average transfer method, to achieve the high accuracy pitch
estimation. Further, the effectiveness of the proposed method
is confirmed by experiment.
Index Terms— Pitch angle estimation, pitch angle
composition, camera ego-motion estimation, range
measurement by vehicle-mounted monocular camera, average
transfer method
1. INTRODUCTION
Environmental sensing technology that can recognize
vehicles, pedestrians, and traffic signs and can measure the
range of targets constitutes the basic requirement to build
Advantage Driver Assist systems and Active-Safety Systems.
Lidar and millimeter wave radar are able to measure the
distance of targets, but the attribute of targets such as vehicles,
pedestrians or another obstacle could not be identified. As a
type of environmental sensing technology, a vehicle-mounted
monocular camera and a stereo camera with advanced image
processing can capture both the attribute information and the
distance information of the targets. In this paper, our interest is
providing safe driving for everyone; therefore, we focus on the
monocular camera that is most advantageous in terms of cost.
The identification of the attribute of targets using feature
detection algorithms, such as HoG [1], and machine learning
methods, such as ada-boost [2], based on a vehicle-mounted
monocular camera provides better performance compared to
millimeter wave radar or lidar. However, millimeter wave radar
and lidar are more stable for range measurement. To achieve a
vehicle-mounted camera based ADAS or Active-Safety
system, the range measurement feature is crucial. Even for a
data fusion system based on camera and radar, in order to
achieve the target matching function, range measurement
capability for the vehicle-mounted camera is likewise required.
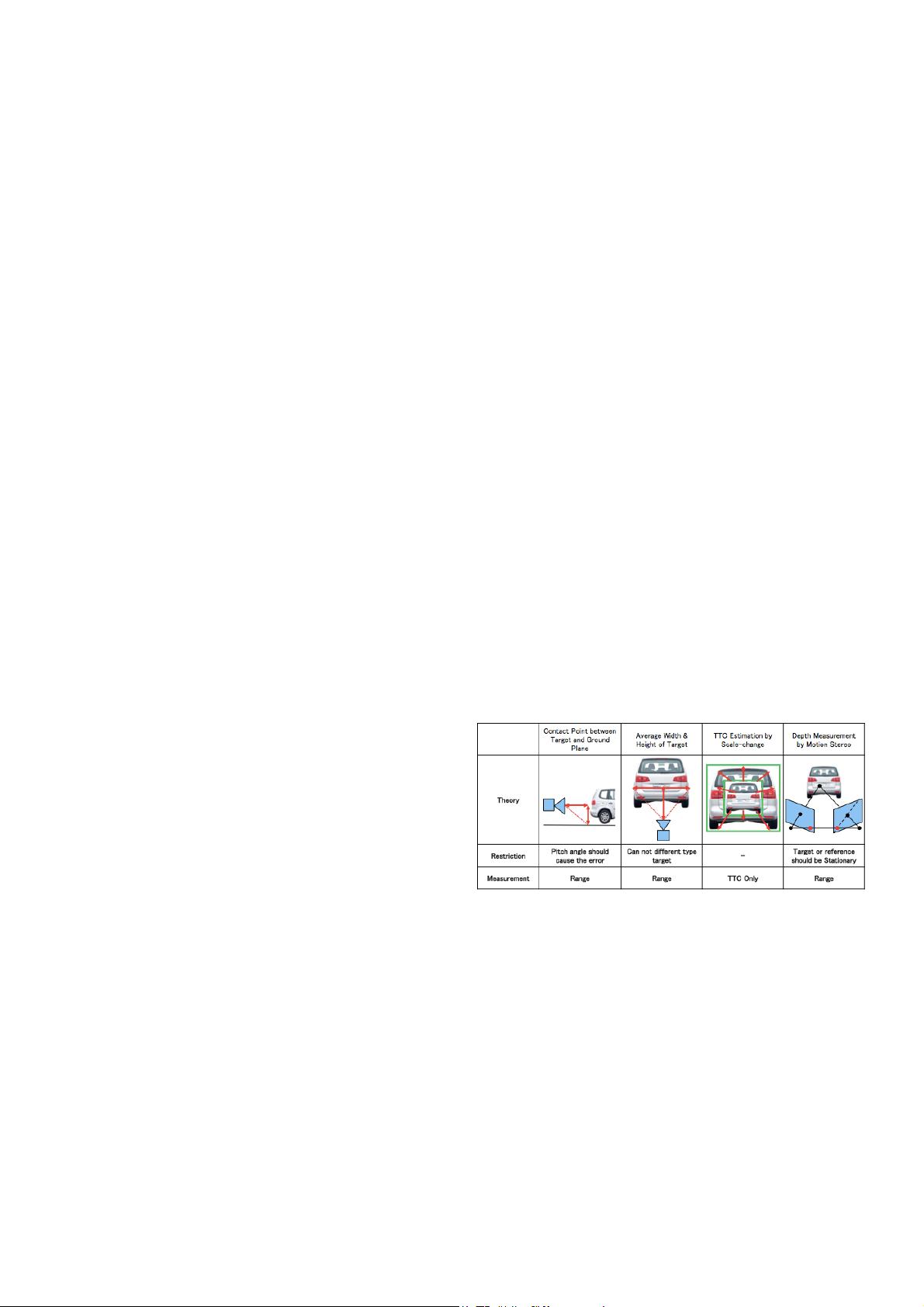
Erez proposed a method [3] that could measure the TTC (Time
to collision) of the targets directly using the scale change rate
of the targets in the images for the Autonomous Emergency
Brake system and the Forward Collision Warning system, but
the range information is necessary for other functions, such as
the Adaptive Cruise Control system. A method that uses the
pedestrian’s average height or the vehicle’s average width to
estimate range was proposed, but when the height or width of
target differs markedly from the preset average value, the range
measurement performance is extremely lessened. The range
measurement using a vehicle-mounted monocular camera with
motion stereo has been attempted [4]. However, the problem
with this method is that the range of the target cannot be
accurately measured when the target is moving because the
prerequisite for using this method is that the target should be
stationary during camera movement. Using the motion stereo
method based on a reference of a stationary object that has the
same range as the moving target can resolve the problem, but
the search for the reference stationary object remains difficult.
Fig. 1 illustrates the range measurement methods using a
vehicle-mounted monocular camera.
Fig. 1. Range estimation using a monocular camera
As shown in formula (1) and Fig. 2, a range measurement
method [5] uses the depression angle of the ground point
proposed by Gideon. The problem with this method, however,
is that the change of the pitch angle due to the number and the
sitting position of passengers and the vehicle’s vibration during
driving greatly influence the accuracy of the range
measurement. Therefore, to achieve the range measurement
using the vehicle-mounted monocular camera, the estimation of
the pitch angle is necessary.
ICSP2014 Proceedings
978-1-4799-2186-7/14/$31.00 ©2014 IEEE
1161
下载后可阅读完整内容,剩余7页未读,立即下载
2022-05-24 上传
2022-11-15 上传
2022-07-15 上传
2021-10-01 上传
2023-05-01 上传
2023-06-12 上传
2023-06-07 上传

挽风~
- 粉丝: 3
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python-2.5.tgz
- lengguanyuantiaoguang.zip_单片机开发_C/C++_
- the_corn_horn
- 易语言农历工具-易语言
- SoftwareEngine:Windows Store应用程序中的软件3D渲染引擎
- docker-laravel-s3-example
- PPT欧美风格57.zip
- 基于UCOS和STM32的ADC采样_stm32ucosII_
- python-3.12.1-embed-arm64.zip
- 易语言图片不规则变形源码-易语言
- 31.rar_matlab例程_PDF_
- PPT静态精选99.zip
- FrontEnd_Assignment:我已经使用ReactJS创建了简单的画布应用程序
- matlab分时代码-neuroconda:在Python,R等中进行神经成像分析的Conda环境
- 第1章 无线信道:传播和衰落_无线信道_
- 易语言取文本串声母源码-易语言
