改进的IVCCS与加权双向距离ICP三维点云配准算法
版权申诉
36 浏览量
更新于2024-06-27
收藏 939KB DOCX 举报
"基于IVCCS的三维点云配准算法是针对三维激光扫描技术中多角度扫描数据的融合问题而提出的一种优化方法。现有的点云配准算法,如ICP及其变种FPFH,虽然提高了计算速度,但在面对噪声干扰时仍存在鲁棒性不足的问题。文献中提到,林俊义等人结合体素云连通性分割(VCCS)与ICP的配准算法在数据丢失和噪声环境下保持了良好的配准精度,但速度并未显著提升。针对这一问题,本文提出了一种改进的体素云连通性分割(IVCCS)结合加权双向距离ICP的配准策略,旨在通过双阈值体素去噪优化VCCS,防止噪声点的误剔除,以增强算法在复杂场景下的适应性和鲁棒性,确保点云配准的精度和成功率。"
在三维点云配准中,IVCCS(改进的体素云连通性分割)是一种关键的技术。传统的VCCS方法在处理噪声点时可能因为单一约束半径的不合适而误剔除有效点,这会影响到后续的配准过程。IVCCS通过引入双阈值机制,可以更有效地过滤噪声点,同时保留关键的几何信息,这对于在复杂环境下的点云配准至关重要。
另一方面,ICP(迭代最近点)算法是点云配准的基石,但其对于噪声的敏感性是长期存在的问题。加权双向距离ICP是对ICP的一种优化,它考虑了点对之间的距离权重,以更好地处理匹配误差和噪声,从而提高配准的稳定性。
文献中提到的FPFH(快速点特征直方图)和PFH(点特征直方图)是局部特征描述符,它们用于识别和匹配点云中的特征点。FPFH在保持特征描述能力的同时减少了计算复杂度,提升了配准效率。尽管如此,这些方法在噪声环境中的鲁棒性仍有待提升。
总结来说,这篇文档探讨了点云配准领域的最新进展,特别是针对噪声点处理和算法鲁棒性的挑战。提出的IVCCS结合加权双向距离ICP的配准算法,旨在通过改进的体素云分割技术和权重优化的配准策略,提高点云配准在复杂环境和噪声条件下的性能,为三维点云数据处理提供更为可靠和精确的方法。
Step3:根据公式(4)分别对体素云 P 和 Q 进行归一化处理,得到归一化后的体素云集
合 P′P′和 Q′Q′。
M=max{xmax,xmin,ymax,ymin,zmax,zmin}M=max{xmax,xmin,ymax,ymin,zmax,zmin}
(2)
s=1/Ms=1/M
(3)
P′=P×sQ′=Q×sP′=P×sQ′=Q×s
(4)
对于归一化后体素云集合 P′P′和 Q′Q′的最小包围盒分别用 U
1
和 U
2
表示。
为了增加体素去噪的运算速度,对体素云进行分层处理,将体素云 P′P′和 Q′Q′按照 Z
轴方向距离信息从小到大进行排序。针对体素空间特性,将 Zhou Shengtao
[19]
等人分层去噪
的思想加以改进,利用体素分辨率 RvRv 设置大小阈值分层厚度,减少 Zhou Shengtao
[19]
等
人算法中针对点云分层厚度的计算,提高去噪运算速率,如公式(5)所示,其中待配准两片
体素云数据在 Z 轴方向的层数分别为 mimi 和 hihi;|Li||Li|为体素云 Z 轴距离信息方向的长
度。
mi=|Li|/Rvhi=|Li|/Rvmi=|Li|/Rvhi=|Li|/Rv
(5)
为了加快体素云运算速度,忽略 Z 方向上的影响,将体素云按照体素分辨率 RvRv 进
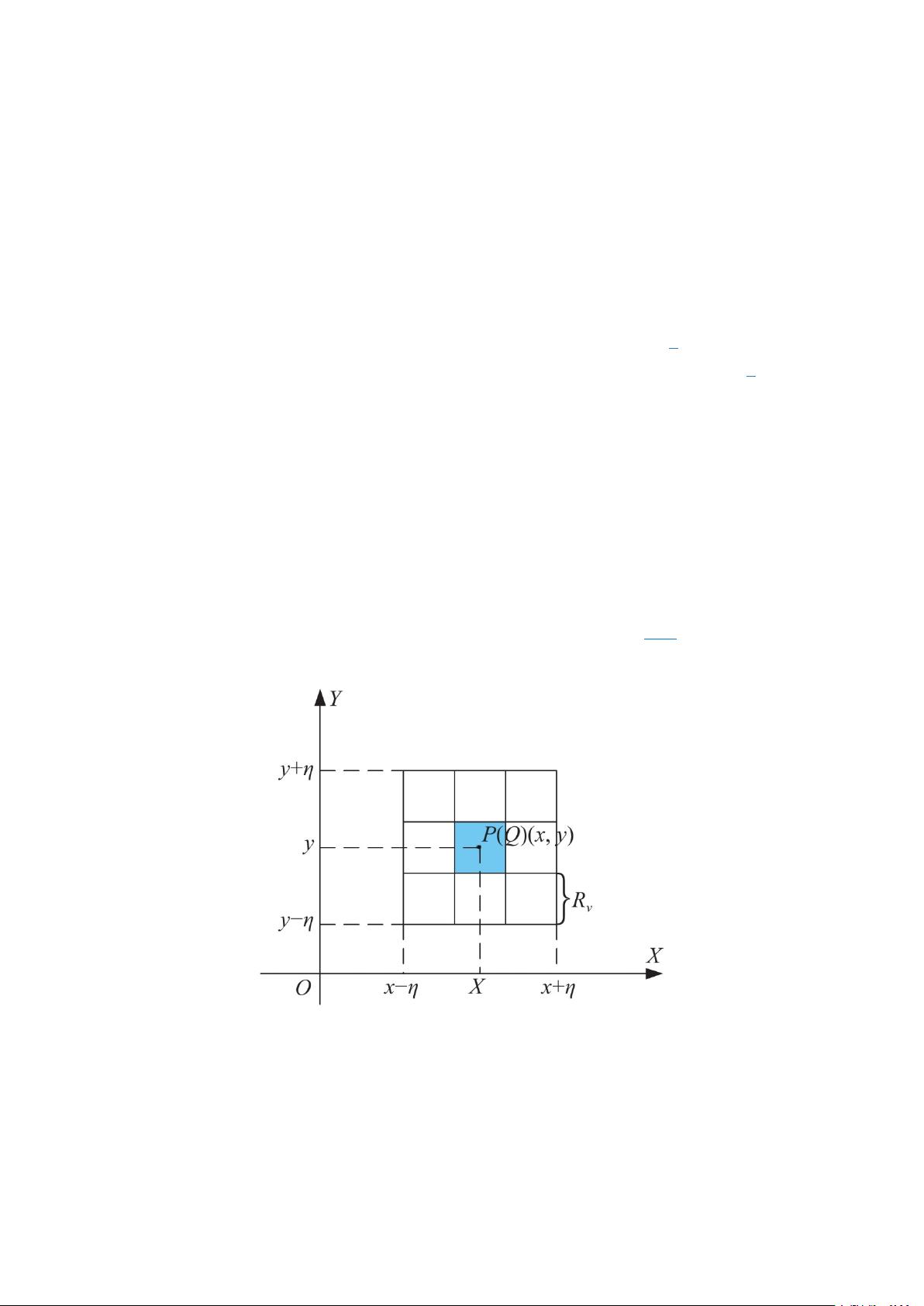
行分层,在第 i(i=1,...,m(h)i)i(i=1,...,m(h)i)层剔除孤立种子体素的过程中,小阈值设置如公
式(6)所示,由于小阈值主要处理的是空间中孤立的漂移体素噪声,根据孤立漂移体素噪声
的空间特性,其一定不具有空间连续关系,因此,通过判断初始种子体素小阈值包围正方
体内是否有唯一体素来剔除孤立噪声体素,其包围正方形 S 的示意图如图 4 所示。
η=3/2×Rvη=3/2×Rv
(6)
图 4 小阈值去噪示意图
Fig. 4 Schematic diagram of small threshold denoising
剩余21页未读,继续阅读
2021-02-12 上传
2020-03-30 上传
2022-12-01 上传
2023-02-23 上传
2022-06-02 上传
2023-02-23 上传
2022-11-30 上传
2022-06-22 上传
2023-02-23 上传

罗伯特之技术屋
- 粉丝: 4501
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java语 言 出 现 的 背景 、 影 响 及 应 用 前 景
- 一篇学生学籍管理系统的论文(仅仅是作业论文,比较适合课后作业设计)
- SQLServer分布式事务服务器的配置.doc
- dac0832芯片资料
- Spring开发指南
- java 简介,分类,目录
- 8088汇编指令8088汇编指令
- Maxwlell 2D例题
- 信息系统安全加密算法和函数
- (ecbpo.com)WAP2.0知识分享PPT
- 51单片机TIMER2.PDF
- 用VB制作flash播放器
- 企业资源计划(erp)基础教材
- SOFTICE使用说明
- 详细设计说明书模板 详细设计说明书模板
- Windows文件系统过滤驱动开发教程(第二版)
