PID控制器参数整定详解
需积分: 9 137 浏览量
更新于2024-07-09
收藏 493KB PDF 举报
"PID控制参数整定.pdf"
PID控制器是一种广泛应用的自动控制算法,它通过结合比例(P)、积分(I)和微分(D)三个部分来调整系统的控制输出,以实现对被控对象的精确控制。理解PID参数的作用原理是优化控制系统性能的关键。
(一)PID参数的作用原理
1. 比例作用(P):比例增益决定了控制器的响应速度。比例增益越大,控制作用越强烈,调节速度加快,但可能会增加超调量,导致系统的稳定性下降。同时,比例作用无法消除余差,即系统可能无法达到设定值。
2. 积分作用(I):积分作用主要用来消除余差,通过积累误差来调整控制输出。积分时间常数决定了积分作用的强度,较小的积分时间常数会使系统更加稳定,但可能导致振荡加剧。PI控制适合于需要快速响应且有一定控制精度的对象,如流量、压力等。
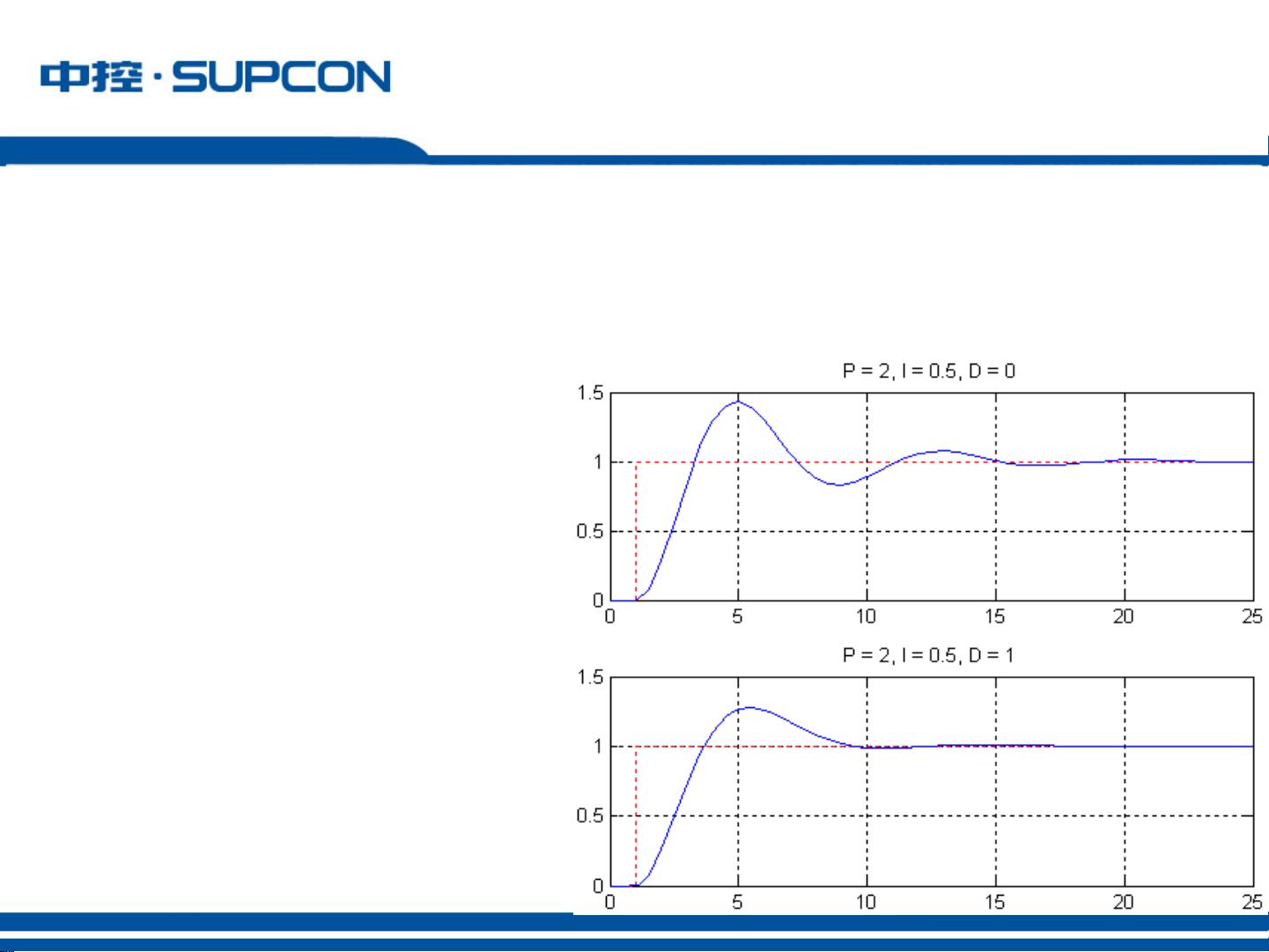
3. 微分作用(D):微分作用通过预测系统的未来变化趋势,提前进行调节,有助于改善系统的动态响应,提高稳定性并减少超调。然而,微分作用可能会放大噪声,因此在实际应用中需要谨慎使用。微分控制适用于惯性较大、响应较慢的对象,如温度控制。
(二)PID参数整定的经典方法
1. 响应曲线法:通过观察系统对阶跃输入的响应曲线来调整参数。
2. 临界振荡法(Ziegler-Nichols法):首先采用纯比例控制,逐渐增强比例作用,直至系统出现等幅振荡,然后根据振荡的幅度和周期来确定参数。
3. 衰减振荡法:在纯比例控制下,寻找能产生4:1衰减振荡的比例增益。
4. 继电器自整定法:利用继电器模拟控制器的动作,通过观察系统响应来自我调整参数。
这些方法各有优缺点,需要根据实际情况选择合适的整定方法,并结合被控对象的特性进行调整,以实现最佳控制效果。例如,对于对控制精度要求不高的对象,可以仅使用比例控制;对于快速响应但容易振荡的对象,可以采用PI控制;而对于惯性大、响应慢的对象,PID控制通常更为合适。
PID参数整定是一门实践性和经验性很强的技术,需要在理论知识的基础上,结合实际运行情况不断试验和优化,以找到最优的控制参数组合,确保系统的稳定性和控制精度。
积分作用(I)
积分作用:弱->强
阻尼:
振荡程度:
稳定性:
PI适合的对象:流量、压力等快速响应的对象
大->小
低->高
好->差
剩余38页未读,继续阅读
2021-10-31 上传
2021-06-29 上传
2021-06-27 上传
2021-09-29 上传
2021-11-20 上传
2021-09-29 上传
2021-09-28 上传
2021-09-29 上传
2019-10-16 上传

是曾与你躲过雨的屋檐
- 粉丝: 14
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
