四轮驱动电动轮车驱动防滑控制策略研究
需积分: 17 162 浏览量
更新于2024-08-11
1
收藏 267KB PDF 举报
"电动轮车驱动防滑控制策略的研究 (2014年)"
本文主要探讨的是四轮驱动电动轮车的驱动防滑控制策略。针对此类车辆的研发,研究者设计了一种基于电机转矩的车轮滑移率估算器,以解决电动车驱动防滑的问题。车轮滑移率是衡量车轮与路面接触状态的关键指标,过高或过低的滑移率都可能导致汽车性能下降。
首先,研究中分析和优化了两种控制算法:模型跟踪控制算法(MFC)和最优滑移率PI控制算法。模型跟踪控制算法通过追踪预设模型来调整驱动力矩,以确保车轮滑移率保持在理想范围内,而不依赖于复杂的路面识别技术,简化了算法,降低了实施成本。而最优滑移率PI控制算法则通过实时调整驱动力矩,使车轮滑移率保持在最优值,以实现最佳的经济性和燃油效率。
此外,研究者还设计了一种基于滑移率估计的模糊控制算法。模糊控制算法利用滑移率估算器的数据,结合模糊逻辑规则,动态调整驱动力矩,从而实现更精细的控制,提高汽车的动力性。模糊控制的优势在于能够应对不确定性,适应各种复杂路况。
通过车辆单轮动力学模型对这三种控制算法进行仿真分析,结果显示它们都能有效地利用路面附着力,防止车轮打滑,提高汽车的行驶稳定性。模糊控制算法在提升动力性方面表现出色,最优滑移率控制算法则强调经济性,而模型跟踪控制算法则因算法简单、成本较低而成为一种实用的选择。
驱动防滑控制系统在电动汽车中的应用是主动安全技术的一个重要领域,它可以显著改善汽车的行驶安全性和操控性。电动轮驱动的电动车由于可以直接测量电机转矩,为实现精确的驱动防滑控制提供了可能。尽管传统的滑移率估算方法如最小车洼法、斜率法和季节调节法存在精度问题,但通过创新设计的滑移率估算器,可以提高估算的准确性,进一步优化驱动防滑控制策略。
这篇论文为四轮驱动电动轮车的驱动防滑控制提供了理论基础和技术支持,为电动汽车的安全性能提升提供了新的解决方案。通过深入研究和比较不同控制算法,研究者为电动汽车行业的技术创新和实际应用提供了宝贵的参考。
第
36
在第
6
期
2014
年
12
月
武汉理工大学学报(
f
言息与管理工程版)
JOURNAL
OF
wur(
INFORMATION
&
MANAGEMENT
ENGINEERING)
Vo
1.
36 No.6
Dec.2014
文章编号
:2095
-3852(2014)06
-0794
-04
文献标志码
:A
电动轮车驱动防滑控制策略的研究
张振良,赵亚超,黄妙华,喻厚宇
(武汉理了大学汽车下程学院,湖北武汉
430070)
摘
要:针对四轮驱动电动轮车的研发,设
ì
I
丁基于电机转矩的车轮滑移率估算器,对用于驱动防滑的模
型跟踪控制算法(
MFC)
和最优滑移率
PI
控制算法进行了深入分析及优化,设
ì
I
丁基于滑移率估
ì
I
的模糊控
制算法,依据车辆单轮动力学模型对这
3
种驱动防
i'
ÏÌ'控制算法进行了仿真分析。
仿真结果表明
:3
种控制算
法均可充分利用路面附着条件,有效进行驱动防滑控制,使汽车具有较好的稳应性。基于滑移率估
ì
I
的模糊
控制算法使汽车具有较好的动力性;最优
i'
ÏÌ'移率控制算法使汽车具有较好的经济性;模型跟
E
主控制算法不需
要依赖路面识别技术,算法简单,成本较低。
关键词:四轮驱动;滑移率估算器;驱动防滑;模糊控制
中图分类号
:TP15;TP13;U461.1
驱动防滑控制系统是一种主动安全技术,通
常是将驱动轮的滑转率控制在当前路面的最优滑
转率以下,以防止车轮打滑而影响汽车行驶稳定
性。传统汽车上主要是控制发动机或传动系来增
减驱动力矩以防止车轮打滑,这种技术在传统汽
车上的运用己日趋成熟。对于电动轮驱动的电动
车而言,电机输出转矩可以进行精确测量,可以根
据电机转矩对车轮打滑状态进行分析估计,从而
对电动汽车的驱动力矩进行有效控制,以达到驱
动防滑的目的。
1
车轮滑移率的估算
大多数车辆
TCS
(
tractÌon
control
叮
stem)
或者
ABS
(
antÌ
-
lock
hrake
system)
采用测量轮洼和车
洼来计算滑移卒,监测车轮运动状态。在
TCS
方
面,传统汽车多是获取参考车洼和轮洼进行比较
来判断车轮的打滑状态,但四轮驱动电动轮车没
有非驱动轮,无法准确测量车辆绝对车洼。车辆
洼度测量仪器多是光电仪器,价格昂贵,实际上很
少安装使用。国内参考车洼的估算办法主要有最
小车洼法、斜率法和季节调节法。然而这些估算
办法估计的车洼比较粗略,精度较低。电动轮驱
动电动汽车具有电机驱动转矩可以精确测量的优
点
[11
因此可基于电机转矩估算滑移率
[21
通常
收稿日期
:2014
-
05
一
14
DOI: 10.
3963/j.
issn. 2095 - 3852. 2014. 06. 015
情况下车轮的滑转率
λ
定义为:
V..
, - V
λ=
飞(1)
式中
:V
为车轮中心的线洼度
;
V
w
为车轮线
洼度。
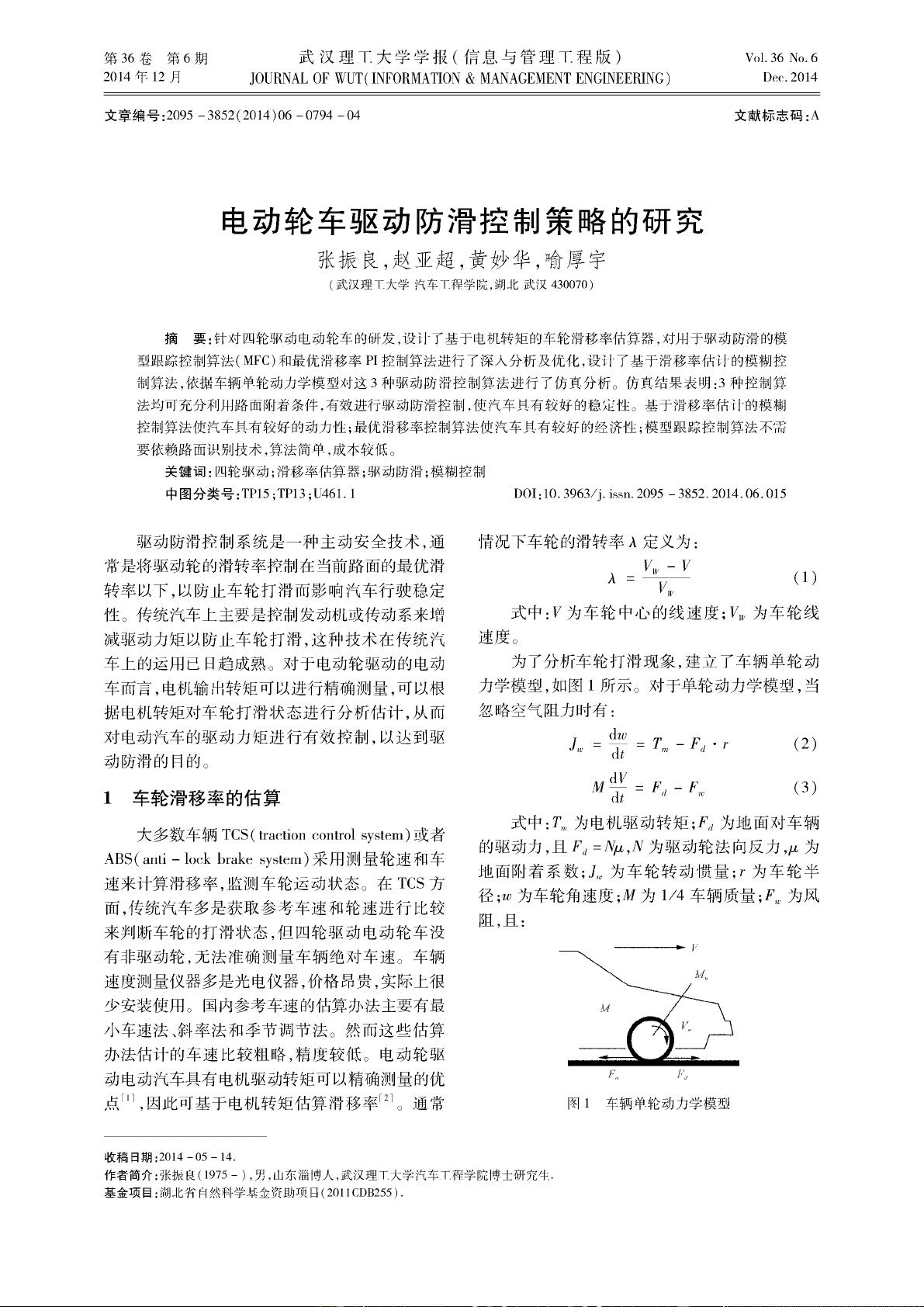
为了分析车轮打滑现象,建立了车辆单轮动
力学模型,如图
1
所示。对于单轮动力学模型,当
忽略空气阻力时有:
J=t=T-FJ
I(2)
dV
M
Lii=Frl-F1C(3)
式中
:T
m
为电机驱动转矩
;Fd
为地面对车辆
的驱动力,且
Fd
=~μ
,
N
为驱动轮法向反力,
μ
为
地面附着系数
;J
1L'
为车轮转动惯量
;
r
为车轮半
径
;w
为车轮角洼度
;M
为
114
车辆质量
;F"
为风
阻,且:
一一-一一一-一一咽
-
f.
M
,
'vf
l
飞
F
,
罔
l
车辆单轮动力学模型
作者简介:张振良
(1975
一)
,男,山东淄博人,武汉理了大学汽车下程学院博士研究牛
基金项目:湖北省自然科学基金资助项日
(2011
CDB255)
下载后可阅读完整内容,剩余3页未读,立即下载
2019-07-22 上传
2021-09-04 上传
2021-09-04 上传
2021-09-04 上传
2021-09-04 上传
2021-09-04 上传
2022-06-22 上传
2021-09-04 上传
2021-09-04 上传

weixin_38564718
- 粉丝: 5
- 资源: 916
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
