STM32单片机实现SPI驱动详解
版权申诉
28 浏览量
更新于2024-08-28
收藏 46KB DOCX 举报
本文档详细介绍了如何在STM32单片机上实现SPI(Serial Peripheral Interface)的驱动程序。STM32是一款广泛应用的微控制器,而SPI是一种常见的串行通信接口,常用于连接各种外设如传感器、显示屏等。
正文:
在开始SPI驱动程序的编写之前,首先需要了解STM32的时钟系统。STM32中的每个外设都有其对应的时钟源,SPI也不例外。为了使SPI1工作,必须启用相应的时钟。在STM32的寄存器配置中,可以通过以下代码启用SPI1的时钟:
```c
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); // 启用SPI1时钟
```
注意,在某些STM32系列中,如STM32F0,SPI2可能位于APB1总线上,因此启用时钟的函数调用会有所不同:
```c
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE); // 对于STM32F0,启用SPI2时钟
```
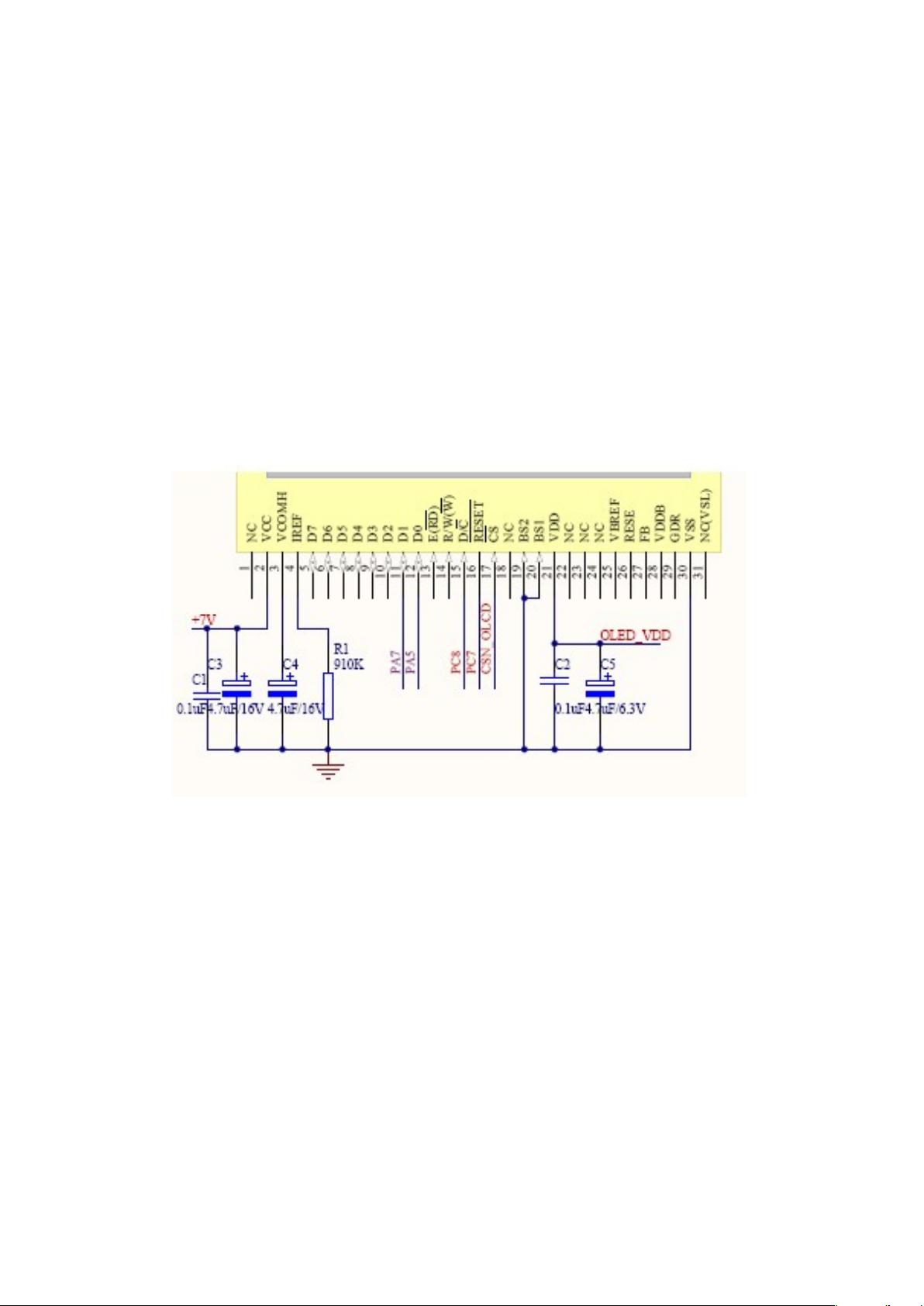
接下来是GPIO(通用输入输出)配置。SPI接口通常需要四个引脚:片选(CS)、时钟(SCK)、MOSI(主输出,从输入)和MISO(主输入,从输出)。在本例中,选择PA4、PA5、PA6和PA7作为这些引脚。配置GPIO为50MHz的速度等级,并根据需要设置为推挽输出(PP)或交替功能推挽输出(AF_PP)。对于SPI,SCK和MOSI应设置为AF_PP,其余如CS、REST(复位)可设置为PP。例如:
```c
// 配置GPIO PA4 (CS), PA5 (SCK), PA6 (REST), PA7 (MOSI)
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // AF_PP for SCK and MOSI
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置GPIO PB1 (DCData/Command) 为普通推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
```
配置完GPIO后,进入SPI的初始化阶段。首先,定义一个`SPI_InitTypeDef`结构体实例,并填充必要的参数。例如,设置SPI的工作模式为全双工,数据宽度为8位,时钟极性和相位,以及数据传输的顺序:
```c
void SPI_cfg(void) {
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 双线双向全双工
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 数据位宽8位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; // 时钟极性低
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; // 时钟相位第一边沿采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // 软件NSS管理
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; // 时钟预分频因子,根据实际需求调整
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // 数据传输从MSB开始
SPI_InitStructure.SPI_CRCPolynomial = 7; // CRC多项式,一般默认即可
SPI_Init(SPI1, &SPI_InitStructure); // 初始化SPI1
SPI_Cmd(SPI1, ENABLE); // 启用SPI1
}
```
在上述配置完成后,就可以进行数据传输操作了。通过SPI发送和接收数据主要使用`SPI_SendData()`和`SPI_ReceiveData()`函数。例如,发送一个字节数据到SPI1:
```c
uint8_t data_to_send = 0x12;
SPI_SendData(SPI1, data_to_send);
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET); // 等待发送缓冲区为空
```
接收数据则可以这样操作:
```c
uint8_t received_data;
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET); // 等待接收缓冲区非空
received_data = SPI_ReceiveData(SPI1);
```
为了确保SPI通信的正确进行,还需要处理中断或者轮询方式下的状态标志,例如检查SPI传输是否完成或是否有错误发生。
总结,实现STM32单片机上的SPI驱动,主要步骤包括:启用SPI时钟、配置GPIO引脚、初始化SPI寄存器设置,以及编写数据发送和接收的函数。理解这些基本步骤将有助于在实际项目中顺利地使用SPI接口。
如何采用 STM32 单片机实现 SPI 的驱动
前言:每学一个新知识,都会出现很多出错的情况,百度也查
不出来,耗费很多时间,主要是不理解底层原理,没太多时间去理
解,催得紧。S(PI)嘛,是人都知道干嘛用的,我一时半会也不知
道怎么表达,百度最不缺的就是定义。缺的是实现过程,本少爷花
了几十个积分搞了 n 多个实例,终于总结了要成功实现 SPI 要哪些
奇葩的步骤。
正文:
---------------------------------------------配置 SPI1
的(时钟)------------------------------------
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,
ENABLE);//SPI1 初始化
//RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2,
ENABLE);//用 F0 时,方法调错但不报错,搞了一天
---------------------------------------------配置 GPIO-
下载后可阅读完整内容,剩余4页未读,立即下载
2022-06-19 上传
2022-07-02 上传
2022-11-18 上传
2022-06-24 上传
2023-06-06 上传
2022-10-30 上传
2020-02-16 上传
2023-09-22 上传
2024-07-20 上传

ziyoudianzi15
- 粉丝: 0
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
