基于动态模型的异步电动机调速系统分析
版权申诉
197 浏览量
更新于2024-07-03
收藏 6.07MB PPT 举报
"电力拖动自动控制系统——运动控制系统:第6章 基于动态模型的异步电动机调速系统.ppt"
本资料主要探讨了电力拖动自动控制系统中的一个关键部分,即基于动态模型的异步电动机调速系统。在实际应用中,为了提升调速系统的性能,尤其是动态性能,需要建立异步电动机的动态数学模型。传统的基于稳态模型的调速系统,如转速开环和闭环转差频率控制系统,虽然在一定程度上实现了平滑调速,但其静、动态性能并不理想,无法与直流双闭环系统的高性能相比。
异步电动机的动态数学模型由于其非线性、强耦合和多变量特性,使得经典控制理论难以应对。为了解决这个问题,现代控制理论被引入,特别是对于多输入多输出的多变量系统,它能更有效地控制异步电动机。两种主流的高动态性能交流调速控制方法是矢量控制技术和直接转矩控制技术:
1. 矢量控制技术:通过矢量变换将异步电动机转换为等效直流电动机模型,从而模仿直流电动机的控制策略。这种方法被西门子、安川等知名变频器公司广泛应用。
2. 直接转矩控制技术:这种方法不依赖于电机模型,而是直接通过计算转矩偏差和定子磁链幅值偏差的符号,根据当前定子磁链矢量位置选取合适的定子电压矢量,实现对电磁转矩和定子磁链的直接控制。目前,ABB公司的变频器普遍采用了这一技术。
文件内容涵盖了以下几个主要知识点:
- 异步电动机动态数学模型的性质:强调了电磁耦合在电机能量转换中的关键作用,以及与他励直流电动机模型的对比,解释了为何异步电动机的控制相对复杂。
- 异步电动机三相数学模型:这部分内容可能涉及电机的电压、电流和磁通之间的关系,以及这些参数如何影响电动机的运行。
- 坐标变换:在控制理论中,坐标变换(如克拉克变换和帕克变换)常用于简化异步电动机的动态模型,使其更适合控制器设计。
- 异步电动机在正交坐标系上的动态数学模型和状态方程:这是建立高性能控制系统的基础,通过坐标变换后的模型,可以更好地分析和控制电动机的动态行为。
- 矢量控制系统:详细介绍了按转子磁链定向的矢量控制,包括其工作原理和优势。
- 直接转矩控制系统:讲解了这种直接对转矩和磁链进行控制的方法,以及与矢量控制的区别。
- 直接转矩控制系统与矢量控制系统的比较:这部分可能涵盖了两者的性能特点、适用场景以及优缺点。
这份资料深入剖析了异步电动机调速系统的设计和控制策略,对理解现代电力拖动自动控制系统的复杂性和先进性具有重要价值。对于学习和研究电机控制、自动化或电力电子的工程师和技术人员来说,是不可或缺的学习材料。
建模条件:
无论异步电动机转子是绕线型还是笼
型的,都可以等效成三相绕线转子,
并折算到定子侧,折算后的定子和转
子绕组匝数相等
异步电动机三相绕组可以是 Y 连接,
或是 Δ 连接。若三相绕组为 Δ 连接,
可先用 Δ—Y 变换,等效为 Y 连接。然
后按 Y 连接进行分析和设计
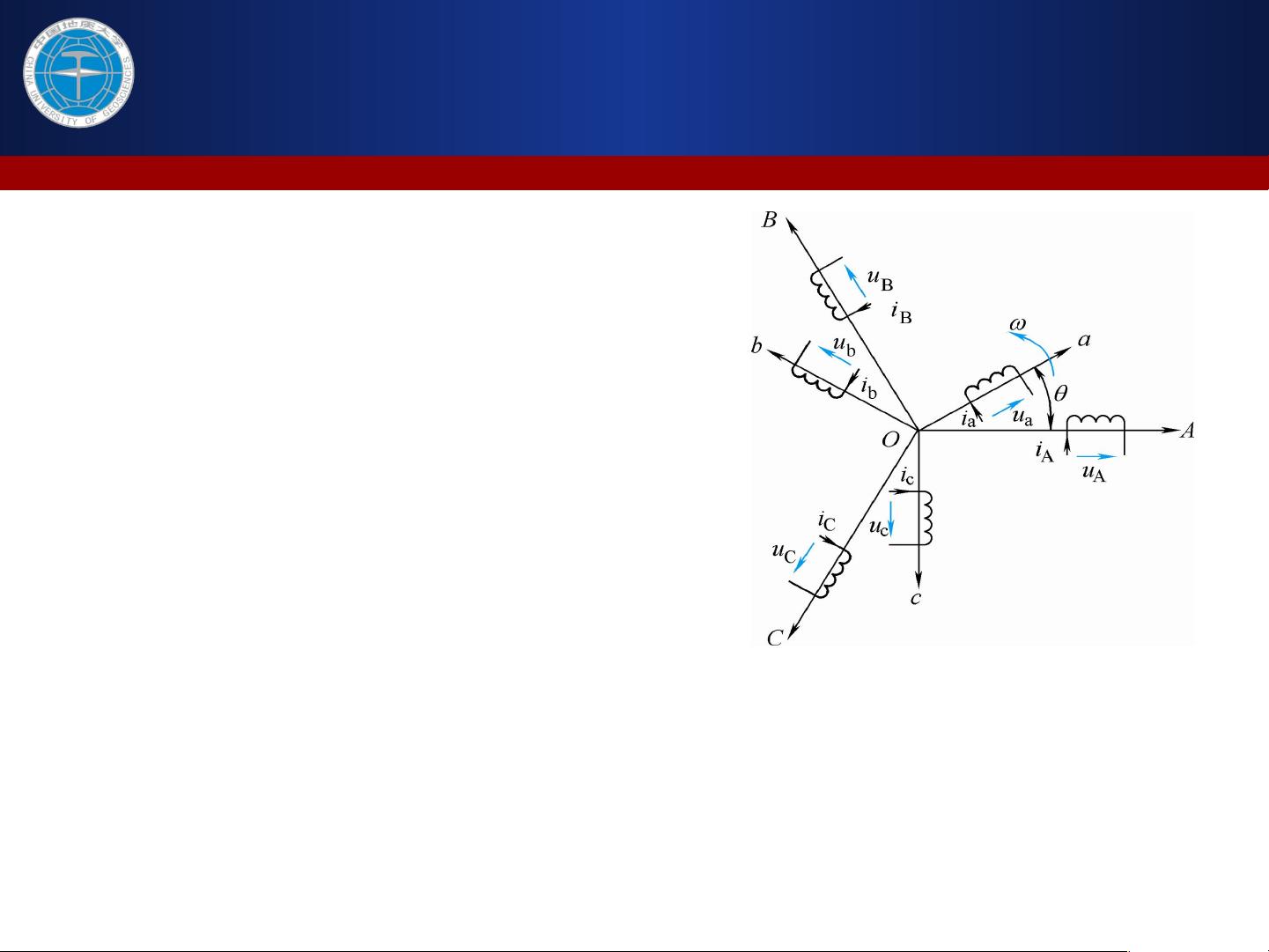
6.2 异步电动机的三相数学模型
•
定子三相绕组轴线 A 、 B 、 C 在
空间是固定的
•
转子绕组轴线 a 、 b 、 c 随转子
旋转
三相异步电动机的物理模型
11
剩余63页未读,继续阅读
2021-09-25 上传
2021-09-17 上传
2022-05-18 上传
2021-09-17 上传
2022-05-18 上传
2021-09-24 上传
2021-10-13 上传
2021-10-13 上传

智慧安全方案
- 粉丝: 3814
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
