GPS导航系统设计与实现:Kalman滤波应用
需积分: 9 31 浏览量
更新于2024-07-31
收藏 1.72MB PDF 举报
"该文档主要探讨了GPS导航系统的实现,特别关注于结合Kalman滤波技术的设计。文章涵盖了从灵感来源、工作流程到硬件配置、数学模型建立、测试与仿真、化学传感器选择以及结论等各个环节。项目旨在开发一个可移动的水上监测平台——GPS机器人水分析器,由Robotic Boat Platform和PC基站点组成。"
在GPS导航设计中,Kalman滤波是一种关键的算法,用于提高定位数据的精度。Kalman滤波器是一种最优估计理论,能够融合来自不同传感器(如GPS和数字罗盘)的不完全或有噪声的数据,从而提供更准确的定位和方向信息。在GPS导航系统中,它能有效处理GPS信号可能出现的丢失或干扰问题。
工作流程描述了从硬件组装编程、数学模型建立到测试和仿真,以及传感器安装的整个过程。硬件部分包括了基于Arm9的S3C2440处理器,运行Windows CE 5.0操作系统,使用C#语言进行编程。系统接收GPS传感器的位置信息、数字罗盘的方向信息,以及距离传感器和水质探头的数据,并通过RS232接口向Atmega128控制板发送指令,同时将数据保存到SD卡上。Atmega128处理器负责处理这些指令,执行导航功能。
硬件组件包括了导航必要的部件,如数字罗盘用于确定方向,GPS传感器提供位置信息,以及电机系统,包括伺服电机控制舵机,直流电机驱动螺旋桨,以实现水上移动。所有这些硬件设备通过RS232通信协议相互连接,协同工作,确保了GPS导航系统及水上监测平台的正常运行。
数学模型部分可能涉及到对GPS信号的处理和解码,以及结合罗盘数据进行航向计算。测试与仿真环节则验证了设计的有效性和可靠性,确保在实际环境中能准确地跟踪和报告移动路径。
化学传感器的选择可能涉及对水质监测的重要参数,如pH值、溶解氧含量、氨氮浓度等的测量,以满足环境监测的需求。最后,通过总结,项目展示了如何整合这些技术和组件,构建出一个高效、可靠的GPS导航系统,用于城市水体的移动监测。
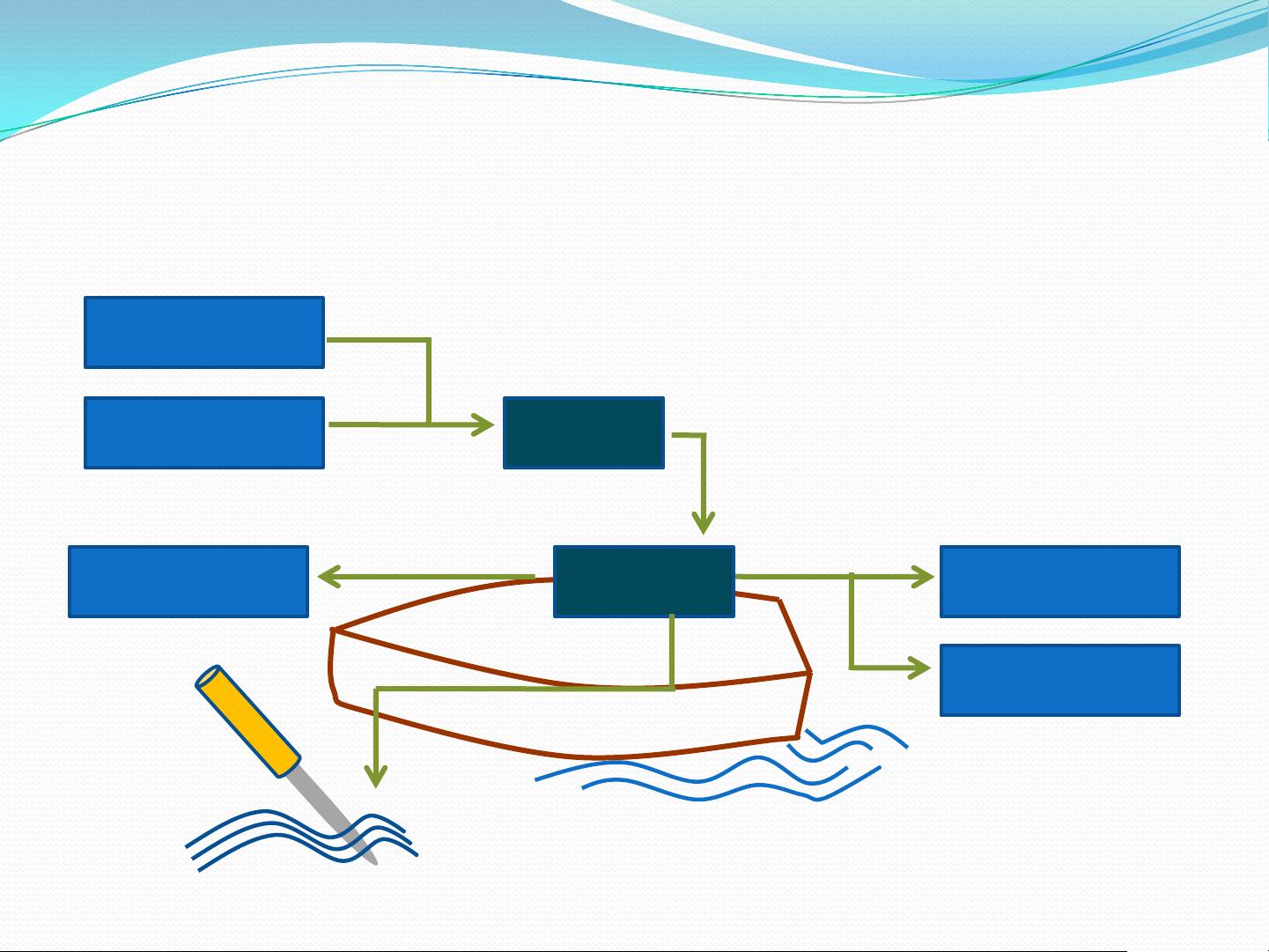
Hardware
RS232: speed & heading
commands
GPS Sensor
Digital
Compass
Rudder
Motor
Arm9
Atmega128
User control &
Reporting (RF)
RS232
RS232
RS232
ADC
PWM

剩余32页未读,继续阅读
2020-10-24 上传
2021-04-16 上传
2021-09-08 上传
2021-09-07 上传
2009-12-19 上传
2021-09-09 上传
2021-09-21 上传
点击了解资源详情

jetlee1986
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
