ATmega16单片机为核心的智能小车控制系统设计
143 浏览量
更新于2024-09-02
收藏 290KB PDF 举报
"基于ATmega16的智能小车控制系统纯硬件电路的设计"
本文详细阐述了如何设计一个基于ATmega16单片机的智能小车控制系统,该系统着重于硬件电路的设计,旨在实现小车的远程控制、环境感知以及自主避障等功能。ATmega16是一款高效能、低功耗的微控制器,被选为整个系统的控制核心,它拥有丰富的外设接口和强大的处理能力。
首先,为了实现无线遥控,系统采用了RF2401无线收发模块。这是一种常见的无线通信模块,用于在一定范围内发送和接收控制指令,使用户能够远程操控小车的行动。无线通信的引入极大地扩展了小车的控制范围,使其能够在更复杂的环境中运行。
其次,DS18B20温度传感器用于监测环境温度。该传感器以其数字输出、精度高和易于接口的特点被广泛使用。通过连接到ATmega16的串行接口,它可以实时地将温度数据传送给控制器,使小车能够根据环境温度做出相应的响应。
此外,超声波传感器是实现障碍物检测的关键部件。它们通过发射和接收超声波脉冲,计算回波时间来测定距离,从而判断前方是否有障碍物。这些传感器的数据同样通过单片机的输入/输出端口进行处理,使得小车能够实时避障,提高其自主导航的能力。
在硬件选型上,系统选择了直流减速电机作为动力来源,因为它们提供稳定的动力并易于控制。L298N电机驱动芯片则用于控制电机的启停和方向,它可以直接与ATmega16的数字输出口相连,简化了驱动电路的设计。
电源管理方面,系统可能采用了双电源模块,以满足不同组件的电压需求。NRF24L01无线模块的选用是为了满足高速无线通信的需求,确保无线遥控的稳定性和效率。
整个智能小车的控制策略基于单片机收集到的各种传感器数据,通过内部算法处理这些信息,决定小车的动作。例如,当检测到前方有障碍时,控制器会计算出最佳的转向或停止策略;温度信息则可能用于某些特定场景下的行为决策。
这个基于ATmega16的智能小车控制系统通过巧妙的硬件设计和有效的传感器集成,实现了复杂环境下的自主导航和环境感知,展示了单片机在工业控制和自动化领域的强大应用潜力。这样的设计不仅提高了小车的功能性,也为其他类似的自动化项目提供了参考。
基于基于ATmega16的智能小车控制系统纯硬件电路的设计的智能小车控制系统纯硬件电路的设计
文章以ATmega16单片机为控制核心,用RF2401无线收发模块进行遥控通信,用DS18B20进行温度检测,同时
采用超声波等传感器材检测信号和障碍物,最后充分利用单片机的串口资源和运算、处理能力,开发设计了一
种智能控制系统,从而实现了小车的测温、躲避障碍物等功能。
摘 要:当前的电动小车基本上采取的是基于纯硬件电路的一种开环控制方法,具有直线行驶、前进、后退、转弯、停车等基
本功能,但在某些特殊场合下却不能采集到有用信息。文章正是在这种需要之下,以ATmega16单片机为控制核心,
用RF2401无线收发模块进行遥控通信,用DS18B20进行温度检测,同时采用超声波等传感器材检测信号和障碍物,最后充分
利用单片机的串口资源和运算、处理能力,开发设计了一种智能控制系统,从而实现了小车的测温、躲避障碍物等功能。
0 引 言
当前的电动小车基本上采取的是基于纯硬件电路的一种开环控制方法, 这种电动小车虽然也具有直线行驶、前进、后退、转
弯、停车等基本功能,但在某些特殊场合,电动小车却无法采集到自动化控制领域的有用信息。在这种情况下,就需要开发用
于自动化控制领域的智能小车。为此,本文以ATmega16 单片机为控制核心,用RF2401 无线收发模块进行遥控通信,同时用
DS18B20 进行温度检测,并采用超声波等传感器材来检测信号和障碍物,最后利用单片机的串口资源和运算、处理能力,开
发设计了一种智能控制系统,从而实现了小车的测温、躲避障碍物等功能。
1 总体方案及器件的选取
1.1 总体方案
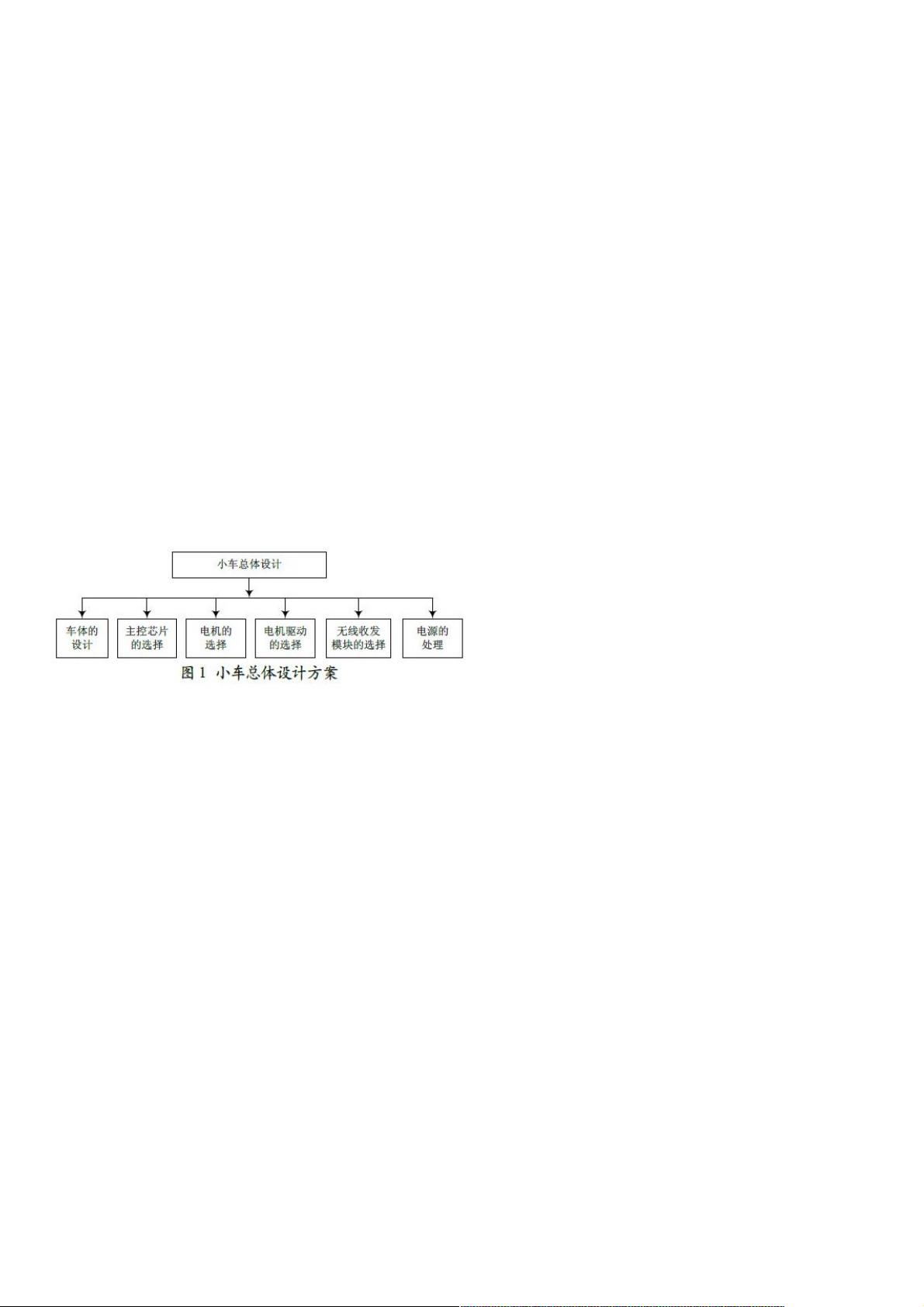
本系统以单片机为核心,增添其他外围设备,如双电源模块、超声波探测器、显示模块、无线收发模块等,以两个直流电机经
过减速箱作为驱动,通过主控单元来处理传感器上信号,处理数据后完成相应的操作,以实现相应的功能。
小车总体设计方案如图1 所示。
1.2 器件的选取
本设计的车体设计由笔者制作。主控芯片采用Atmel 公司推出的高性能、高速度、低功耗的ATmega16 AVR 单片机作为电动
车的主控制芯片;电机选择使用控制方法较为简单的直流减速电机作为电动车的驱动电机;电机驱动选择可直接对电机进行控
制,而无须隔离电路的L298N 作为电机驱动芯片。
系统无线收发模块采用Nordic 公司能满足较大传输速率无线通信需求的NRF24L01 芯片;对于电源的处理,本设计采用2 节锂
电池12 V 来驱动电机芯片,然后用7805 稳压管来形成5 V 电压给单片机供电,无线传感器NRF24L01 的电源用3.3 V 电压提
供。
2 硬件实现
2.1 ATmega16 单片机
AVR 单片机是Atmel 公司推出的较为新颖的单片机,其显着的特点为高性能、高速度、低功耗。
而ATmega 系列是AVR 单片机中的高端产品。单周期可执行本指令功能,同时完成下一条指令的读取。通常时钟频率用6~16
MHz,故最短指令执行时间为250~125 ns.还有I/O 第二功能,内部有时钟电路、10 Bit AD 功能,片内资源很丰富。
2.2 ATmega16 最小系统图ATmega16 单片机的最小系统如图2 所示。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-05-31 上传
2020-10-20 上传
2021-09-20 上传
2021-09-14 上传
点击了解资源详情
点击了解资源详情
2024-04-06 上传
2012-05-17 上传

weixin_38666823
- 粉丝: 5
- 资源: 971
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
