惯性导航系统基础:坐标系详解
需积分: 0 20 浏览量
更新于2024-07-01
收藏 1.07MB PDF 举报
"惯性导航系统(INS)利用陀螺仪和加速度计测量载体的运动参数,通过惯性定律计算位置、速度和姿态。本文详细介绍了惯性导航中常用的三种坐标系:地心惯性坐标系(i系)、地球坐标系(e系)和导航坐标系(n系)。
地心惯性坐标系(i系)是研究地球表面和近地空间载体导航定位的基础,原点位于地心,ox轴指向春分点,oz轴与地球北极对齐,oy轴构成右手直角坐标系。
地球坐标系(e系)适用于地球表面附近的运动,原点同样在地心,oz轴指北极,ox轴位于格林尼治子午面与赤道的交点,oy轴则构成右手坐标系。
导航坐标系(n系)是惯导系统计算导航参数时所用的坐标系统。平台式惯导系统中,平台坐标系即为导航坐标系;捷联式惯导系统则需选择一个便于计算的坐标系,如指北方位坐标系、自由方位坐标系或游移方位坐标系,这些坐标系的原点通常在载体质心,轴向可以根据当地地理位置和计算需求来设定,如东北天(ENU)、北天东(NUE)、北西天(NWU)或北东地(NED)等。
在INS的工作过程中,传感器测量的数据会在这些坐标系之间转换,以准确地描述和计算载体的动态行为。理解这些坐标系及其相互关系对于理解和设计惯性导航系统至关重要。"
西北工业大学规划教材 惯性组合导航原理与应用
–
52
–
虽然只要测出光程差,就可求出闭合环形光路相对于惯性空间的转动角速度。但由
于现实中光程差非常微小,只有激光和光纤出现后,利用环形激光行波谐振腔双向行波
间的谐振频率差或是利用多圈光纤构成等效面积相当大的光纤陀螺,才真正使
Sagnac 效
应获得了实用价值。
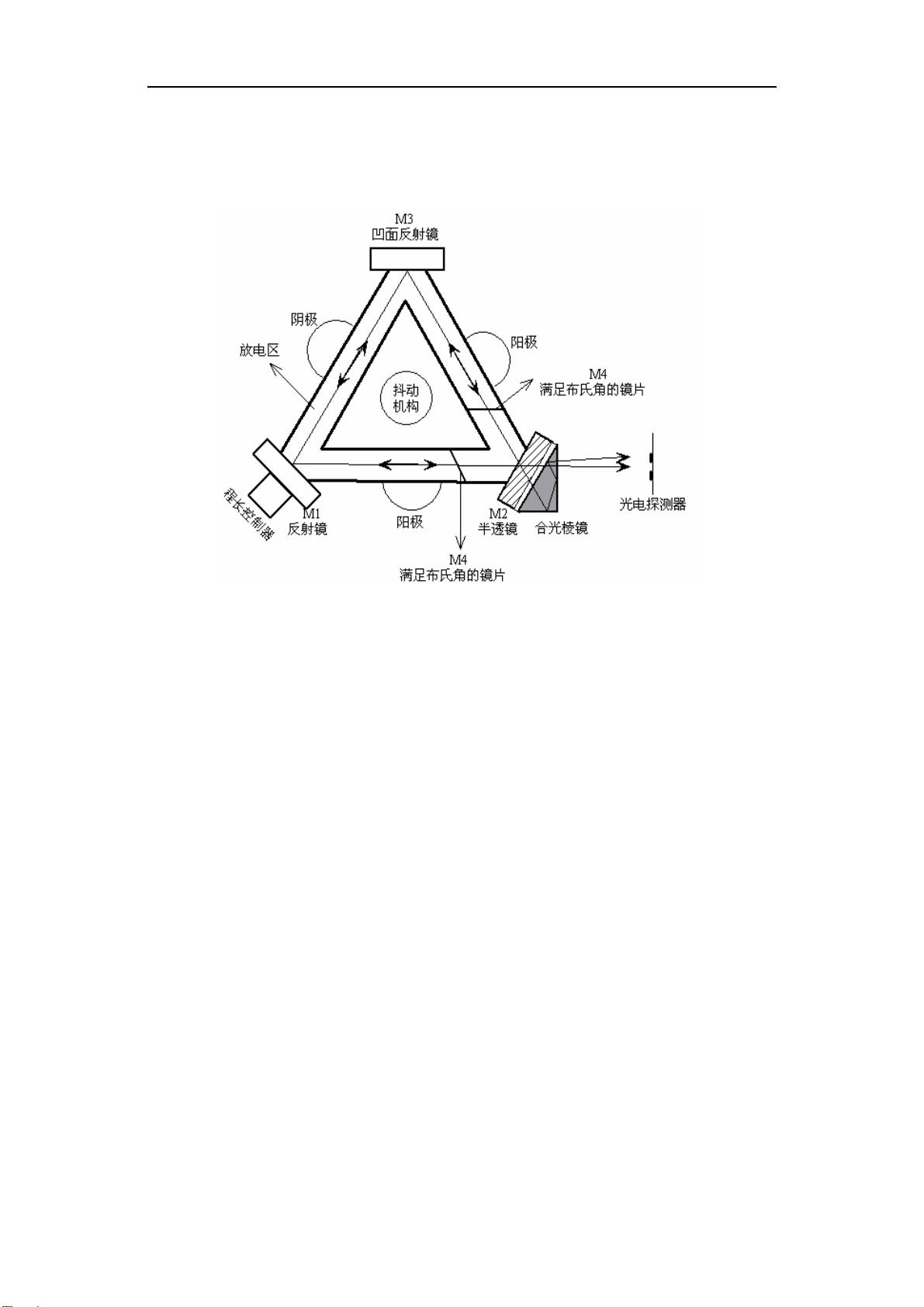
在实际的应用中,激光陀螺依靠环形激光器内的两束反方向运行的行波间的频率差
来测量载体的角速度。环形激光器的谐振腔通常由三面或四面高质量的反射镜构成,根
据行波谐振腔理论,腔内沿相反方向传播的两束行波的谐振频率必须满足
CW CW
CCW CCW
qc L
qc L
ν
ν
=
⎧
⎨
=
⎩
(2-20)
其中
q 是整数,称为行波纵模阶次。
CW
L 和
CCW
L 分别是顺、逆时针光波对应的环形行波
谐振腔的光程长度。由上式可以求得环形行波振荡器正、反向行波间的频率差为
4
CCW CW
A
L
νν ν
λ
Δ−=Ω= (2-21)
其中
L
A
λ
4
称为标度因数。
将
(2-21)式对时间 t 求积分,可得时间 t 内由于正、反向行波频率差所积累的周期数
为
00
44
tt
AA
Ndt dt
LL
ν
θ
λλ
=Δ = Ω =
∫∫
(2-22)
这就是作为角度传感器的激光陀螺的输出信号。
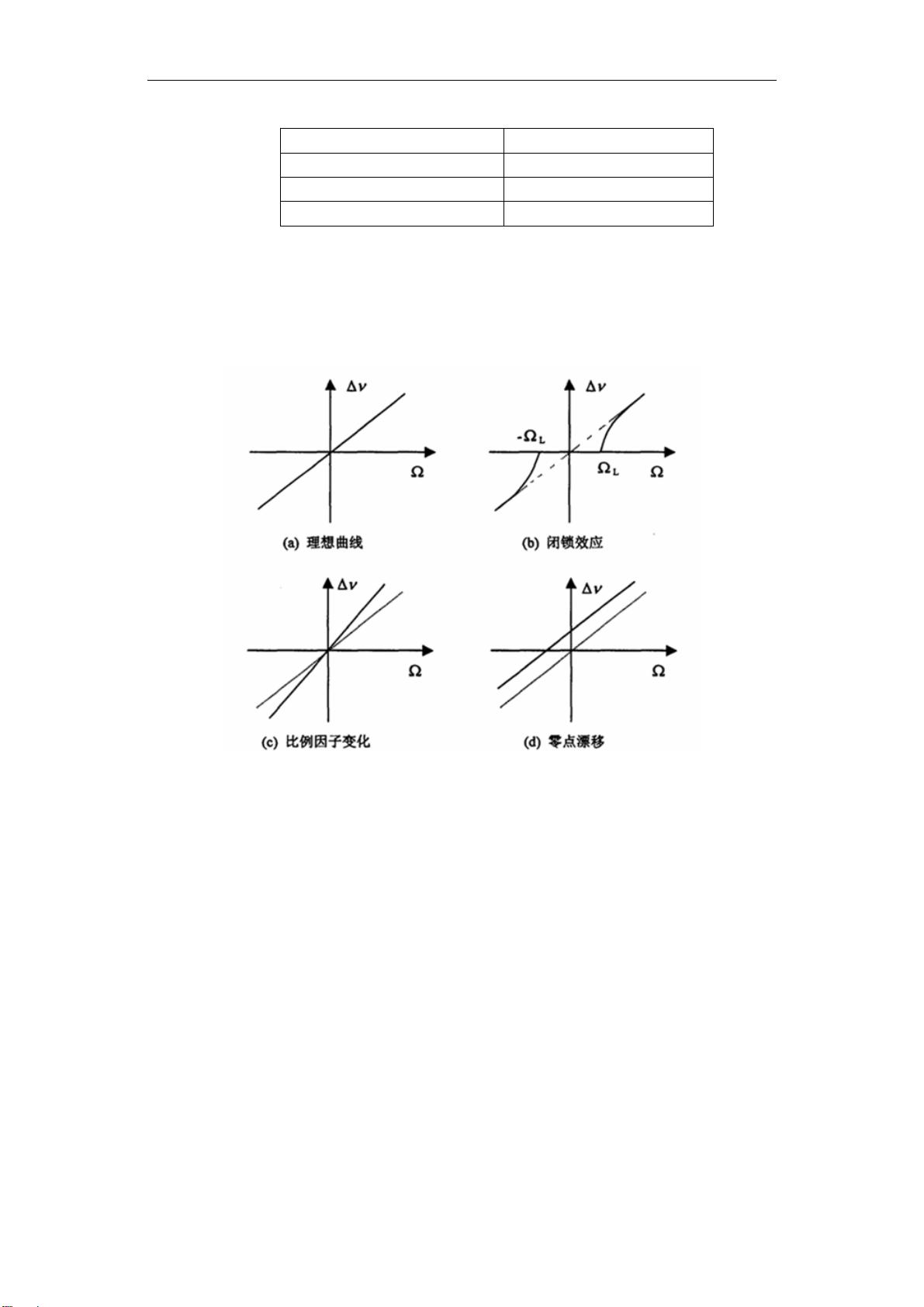
当输入角速率较小时,陀螺的频率差将消失,这被称为闭锁效应。闭锁效应对激光
陀螺的应用是不利的。为消除闭锁效应人们采取了几种不同的措施。根据克服闭锁效应
的措施不同,激光陀螺可分为:机械抖动偏频激光陀螺、磁镜偏频激光陀螺、恒速偏频
激光陀螺、四频差动激光陀螺等几种类型。其中,机械抖动偏频激光陀螺(简称机抖陀
螺)利用交变的机械抖动结构使陀螺大部分时间从闭锁区偏置出来,从而大大减小了闭
锁误差。
激光陀螺仪的主要部件包括:
(1)激光腔体:由低膨胀系数的陶瓷玻璃组成,如索罗杜或塞维特。其内部是激光
介质,通常为氦和氖的双同位素构成的混合物,能够使两种激光模互不干涉地传播。
(2)光学组件:通常由平面镜和光电检测器构成。所有平面镜都是由不同折射率的
物质层交替组成的多层绝缘叠层,然后沉积在抛得很光的基片上,以减少后向散射。
(3)非光学部件:通常的结构中有一个阴极与两个阳极,当外加高压作用于电极上
时,将产生放电,它是激光作用的振源。

剩余94页未读,继续阅读
951 浏览量
166 浏览量
139 浏览量
145 浏览量
2021-11-16 上传
2021-11-16 上传
2021-11-16 上传









