四轴飞行器图像伺服的有限时间控制:非奇异快速终端滑模方法
4 浏览量
更新于2024-08-27
收藏 1.29MB PDF 举报
"本文探讨了基于图像的四轴飞行器视觉伺服控制(Image-Based Visual Servoing, IBVS)在图像动力学不确定性及外部干扰下的有限时间控制策略。使用非奇异快速终端滑模(Nonsingular Fast Terminal Sliding Mode, NFTSM)控制器设计方法,以确保系统的快速稳定和抗干扰能力。"
这篇研究论文深入研究了有限时间控制技术在基于图像的四轴飞行器视觉伺服系统中的应用。四轴飞行器模型首先被建立,考虑了传感器仅使用单目相机和惯性测量单元的实际情况。通过定义虚拟图像平面上的适当图像特征,并结合透视投影,开发了图像动力学模型。这个包含12个状态的视觉模型被分解为6个子系统,以便于设计有限时间控制器。
非奇异快速终端滑模控制器是论文的核心创新点。这种控制器的设计目标是在有限时间内实现系统的快速收敛,并具有良好的抗干扰性能。通过Lyapunov稳定性理论,论文证明了该控制器的有限时间收敛性质以及对扰动的抑制能力。这表明,即使在存在不确定性和外部干扰的情况下,系统也能在预设的时间内达到期望的稳定状态。
关键词包括:四轴飞行器、基于图像的视觉伺服、有限时间控制,强调了这项工作在实时性、鲁棒性和精度方面的贡献。最后,论文通过模拟结果展示了所提方法的有效性,进一步验证了有限时间控制策略在实际应用中的可行性。
这篇论文为四轴飞行器的视觉伺服控制提供了一个高效且鲁棒的解决方案,尤其是在面对复杂的环境条件和不确定性时,能够保证飞行器的精确定位和跟踪性能。这为无人飞行器自主导航和精密操作等领域提供了理论支持和技术参考。
where F ∈ R
3
and
τ
= [
τ
ϕ
τ
θ
τ
ψ
]
T
denote the
force and torque vectors, both are expressed in the body
frame, and results from the action of the quadrotor mo-
tors and the gravity, respectively. d
F
∈ R
3
and d
τ
=
[
d
τϕ
d
τθ
d
τψ
]
T
denote the uncertainties and external
disturbances of quadrotor. Specifically, the input force F
in (5) has the following form
F = −
1
m
T E
3
+ gR
T
e
3
(7)
where T denotes the total thrust force generated by four
actuators, and g is the gravity acceleration. E
3
and e
3
de-
note the unit vectors respectively in the body frame and
inertial frame, and E
3
= e
3
= [
0 0 1
]
T
.
3. IMAGE DYNAMICS
In this section, image features and their dynamics used
in the IBVS scheme are derived. The choice of image fea-
tures is significant for the performance of a visual servo-
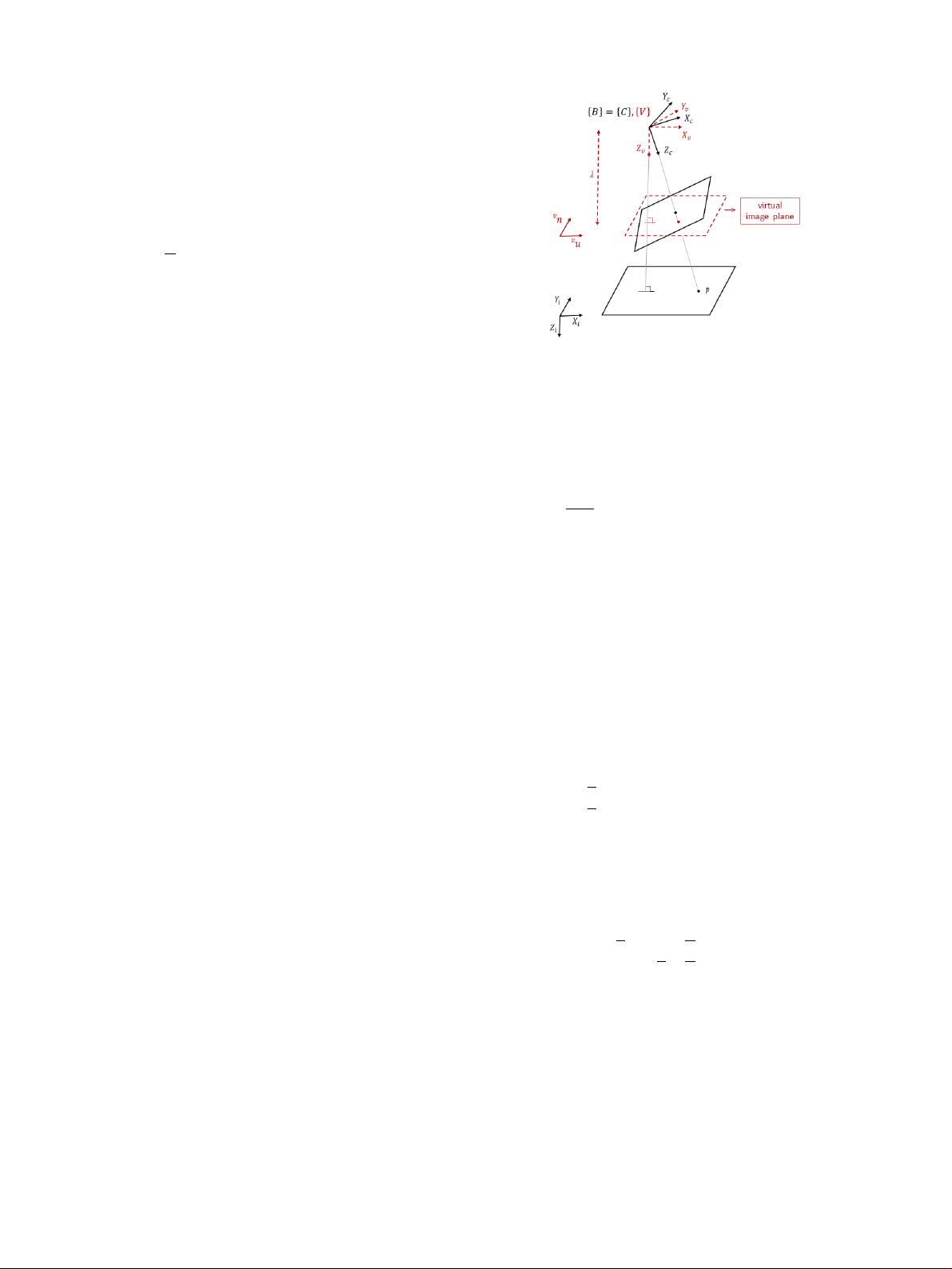
ing system. In this paper, the quadrotor is equipped with
a fixed camera that looks down. The origin of the camera
frame C = {O
c
,X
c
,Y
c
,Z
c
} locates at the center of camer-
a lens, and we assume that the camera frame C coincides
with the body frame B for convenience. The image plane
is orthogonal to the axis Z
c
, and it locates at a position
with distance
λ
(the focal length) from O
c
.
Next we define a new coordinate frame V = {O
v
,X
v
,
Y
v
,Z
v
} and name it virtual camera frame, whose origin is
the same as the actual camera frame. The roll and pitch
angles of frame V are zeros and the yaw angle is the same
as the actual camera frame. Associated to the frame V , let
us define a virtual image plane, whose position and ori-
entation with respect to frame V is the same as the actual
image plane with respect to frame C. This virtual image
plane parallels to the horizontal plane so that the ground
targets have the same depth value. Hence, we can project
the point features to the virtual image plane, and then de-
rive the feature dynamics in the virtual image plane.
Suppose that there exists a stationary point p with coor-
dinates
I
p =
I
x
I
y
I
z
T
in the inertial frame.
c
p(t) =
c
x
c
y
c
z
T
and
v
p(t) =
v
x
v
y
v
z
T
are the co-
ordinates of p projected in the camera frame and virtual
camera frame, respectively. The relation between
I
p and
v
p(t) are described by
v
p(t) = R
T
ψ
I
p −O
v
(t)
(8)
where R
T
ψ
is the rotation matrix of angle
ψ
around axis
Z
i
, O
v
(t) is the origin of the camera frame or virtual cam-
era frame with respect to the inertial frame. Then, the time
derivative of
v
p(t) is
Fig. 1. Camera frame C with the corresponding image
plane and the virtual camera frame V with it’s vir-
tual image plane.
v
˙p =
dR
ψ
d t
T
I
p −O
v
−R
T
ψ
˙
O
v
=
R
ψ
sk(
˙
ψ
e
3
)
T
I
p −O
v
−R
T
ψ
(t)
˙
O
v
= −sk(
˙
ψ
e
3
)R
T
ψ
I
p −O
v
−R
T
ψ
˙
O
v
= −sk(
˙
ψ
e
3
)
v
p −v (9)
where
˙
O
v
=
c
v
x
c
v
y
c
v
z
T
is the linear velocity of
the frame C or frame V with respect to the frame I, and
v =
v
v
x
v
v
y
v
v
z
T
is the
˙
O
v
expressed in the virtual
frame.
In order to derive the dynamics of image features, using
the perspective projection equation, we obtain the coordi-
nates (
v
u,
v
n) of the point p in the virtual plane
v
u =
λ
v
x
v
z
v
n =
λ
v
y
v
z
(10)
where
λ
is the the focal length.
Based on (9) and (10), the relation between the veloci-
ty of a point p in the virtual image plane and velocity of
virtual camera frame V is obtained as follows
v
˙u
v
˙n
=
−
λ
v
z
0
v
u
v
z
0 −
λ
v
z
v
n
v
z
v
v
x
v
v
y
v
v
z
+
˙
ψ
v
n
−
v
u
(11)
In IBVS, the selected image features are usually sensi-
tive to the control of the quadrotor. In this paper, we define
several image features based on the perspective image mo-
ments for the objective of controlling the translational and
rotational motion of quadrotor. To achieve the objective,
the following assumptions about the observed target are
adopted.
3
剩余10页未读,继续阅读
176 浏览量
864 浏览量
2025-01-08 上传
2025-01-08 上传
2025-01-08 上传
2025-01-08 上传
2025-01-08 上传

weixin_38552083
- 粉丝: 7
- 资源: 887
 我的内容管理
展开
我的内容管理
展开







