模块化攀爬机器人控制器设计与实现:STM32+F103C8T6与人机交互
版权申诉
83 浏览量
更新于2024-06-23
收藏 1.75MB DOC 举报
本文主要探讨了"路机器人控制器设计",针对农业、林业、建筑业等领域中的高空作业需求,提出了一个小型模块化双手爪机器人设计。这个创新项目的目标是通过机器人技术模拟人类在高风险环境下的工作,提高工作效率和安全性。
首先,作者在对国内外攀爬机器人研究现状进行深入分析的基础上,确定了机器人结构和控制系统的设计思路。模块化设计被应用,包括机械手爪、吸盘和直流电机轮三种不同的末端执行器,以适应不同环境条件。通过UG NX 7.5三维建模软件,完成了机器人的详细设计,而CAD 2008则用于制作工程图纸,确保设计的精确性和可行性。
在硬件层面,选择RISC单片机STM32F103C8T6作为控制核心,这款芯片以其Hardware结构和高效性能支持系统的稳定运行。设计中涵盖了时钟电路、复位电路、下载电路以及舵机控制电路,确保了机器人内部信号的准确传输和响应。利用单片机内部的PWM脉宽调制模块,实现了多路伺服舵机的精确协同控制,从而实现机器人的精确运动。
为了增强人机交互,设计中引入了三星S3C2240A作为手持式设备的控制中心,TQ2440开发板成为用户界面,使得操作者可以方便地与机器人进行对话,并实时监控其工作状态。此外,还开发了摇杆式无线控制器,以便在恶劣环境中进行远程操控,提高了操作的灵活性。
整个设计巧妙地融合了机电一体化技术,特别是单片机技术和PWM调制技术的应用,使得机器人具备了高效稳定的控制系统。模块化的结构设计不仅使其在工程作业中有广泛的应用,还在一定程度上体现了娱乐功能,比如通过集成两轮自平衡系统,与当前流行的两轮自平衡车理念相融合,展示了其在休闲娱乐场景中的潜力。
本研究的路机器人控制器设计,不仅解决了高空作业的安全问题,还展现了机器人技术在多元化应用场景中的可能性,为未来智能机器人的发展提供了新的思路和实践案例。
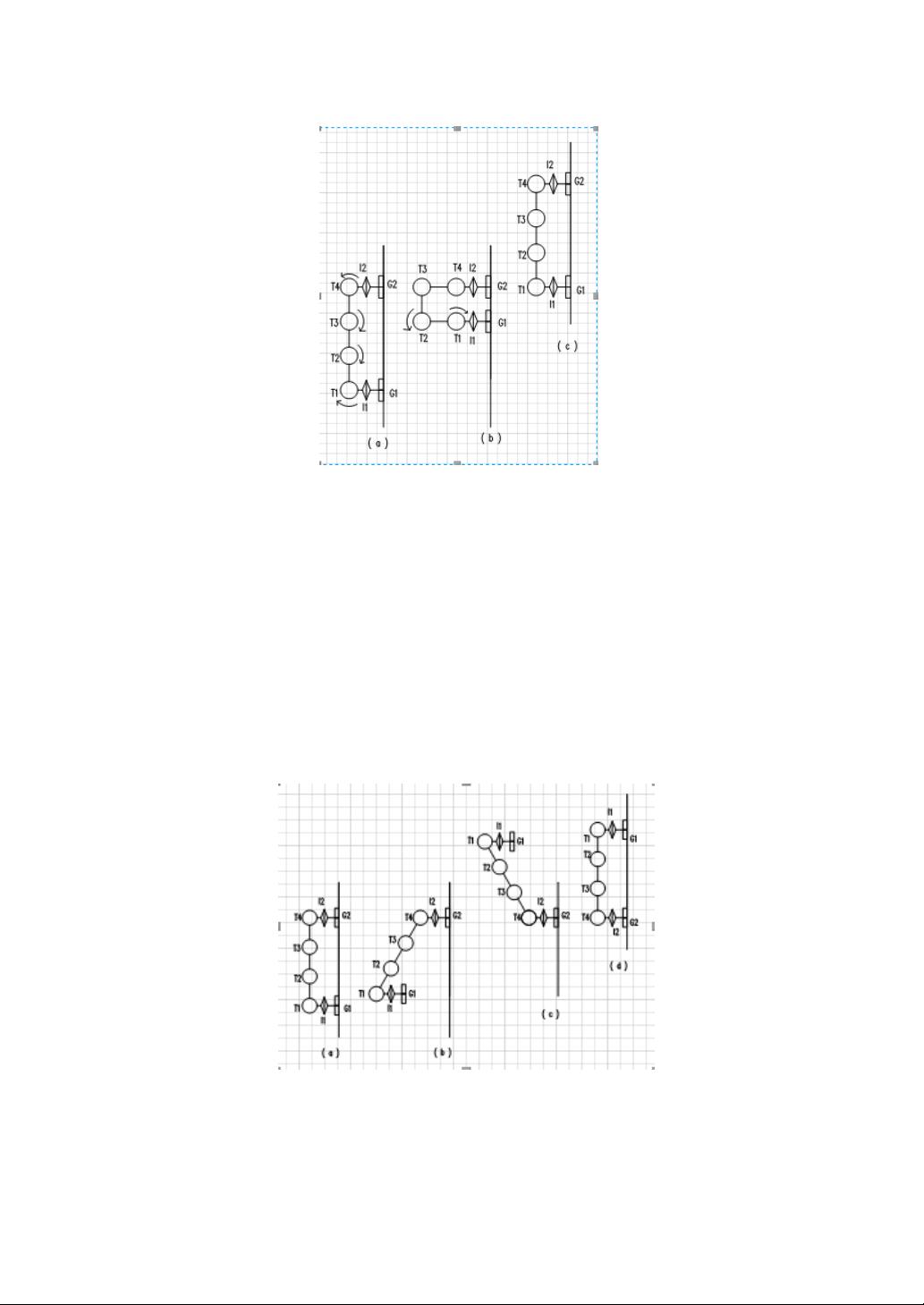
图 2-4 尺蠖模式步态分析
其攀爬步骤如下:
(1) 机器人位于初始位置,夹持器 G
1
和 G
2
都为夹紧状态。G
1
慢慢
张开,G
2
仍然保持夹紧,独立支撑机器人(图 2-4a)。
(2) 摆动关节 T
1
、T
2
、T
3
和T
4
开始协调转动,机器人躯体收缩。要
求当 T
1
和 T
3
转过 α 角时,T
2
应转90°(图2-4a、2-4b)。
(3) 当摆动关节完成转动后,夹持器G
1
开始闭合直至夹紧杆件。然后
G
2
慢慢张开,机器人由G
1
单独支撑(图2-4b,机器人完成了换手支撑)。
(4) 摆动关节T
1
、T
2
、T
3
和T
4
开始协调运动,回到其初始角度,最
后G
2
夹紧。此时机器人便完成了尺蠖运动的一个循环(图2-4b、2-4c)。
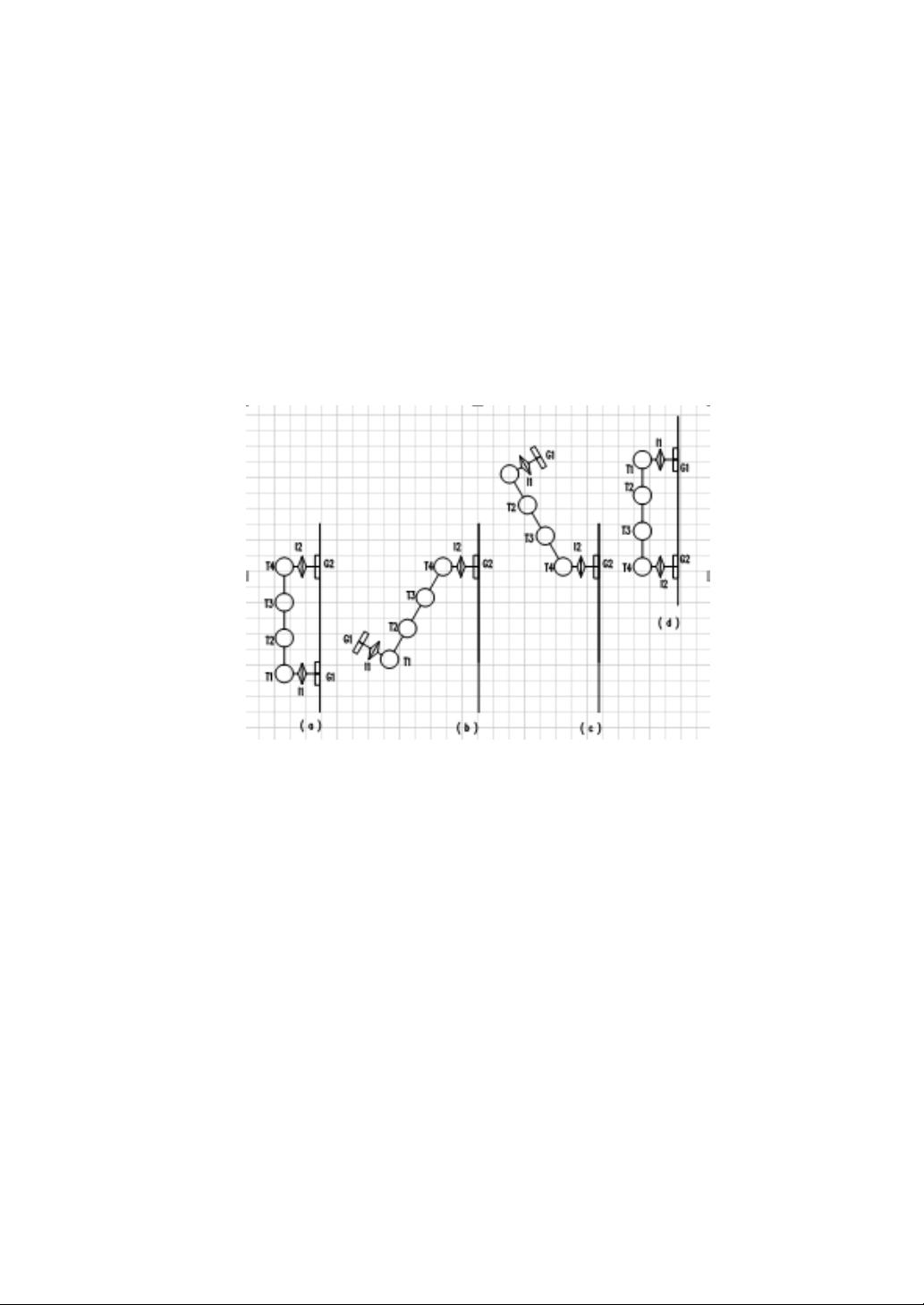
第二种步态为扭转模式,如图 2-5 所示。
图 2-5 扭转模式步态分析
其攀爬步骤如下:
(1)机器人位于初始位置,夹持器 G1 和 G2 都处于加紧状态。G
1
慢慢
张开,G
2
仍然保持夹紧,独立支撑机器人(图 2-5a)。

剩余74页未读,继续阅读
115 浏览量
2023-07-13 上传
2023-07-11 上传
2023-07-11 上传
2023-07-11 上传
2023-07-07 上传
2023-07-13 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- c2k:将cron表达式翻译成韩语
- 知识::light_bulb:记录一切
- 基于STM32的风力摆控制系统.zip
- gobed:Gobed是具有更多功能的“睡眠”替代品
- 坎纳萨皮
- 绩效管理:如何落到实处
- multiDB:NodeJS + Docker
- ndp4:Udacity 前端 Web 开发人员纳米学位项目 4 - 网站优化
- contentful-ui-extensions:我们在Last Rev中使用的有用的UI扩展,用于客户项目
- 生产管理部车间主任岗位说明书
- 电动汽车用电机控制器 的功能安全,电动汽车电机控制器的作用,C,C++源码.zip
- 采购服务器
- College-Management-Portal-layout:高校管理门户
- StopTimer:目前可在Google Play上获取Android应用程序的完整源代码-Android application source code
- 从站到PS
- Day-9:第九天的家庭作业
