FANUC机器人操作指南
版权申诉
"发那科(FANUC)机器人操作说明书详细介绍了如何操作FANUC机器人,包括机器人结构、控制装置、坐标系、程序创建、动作指令、焊接指令、摆动指令和寻点指令等内容,旨在帮助用户熟练掌握机器人操作。"
FANUC机器人是一款由伺服电机驱动的先进设备,主要由基本轴(J1、J2、J3)和机械手腕(包括轴杆和关节)组成。基本轴是机器人构架的基础,可以实现不同方向的运动。机械手腕能够安装末端执行器,如焊枪,并能执行各种动作,如扭转、上下摆动和左右摆动。
控制装置包括电源装置、用户接口电路、动作控制电路、存储电路和I/O电路。用户通过示教器进行操作,示教器上有与菜单、JOG、执行和编辑相关的键控开关,方便用户进行各种功能的设置和控制。
在FANUC机器人的坐标系中,有几种不同的类型:
1. 关节坐标系:以各关节的底座侧为基准,定义了机器人的位置和状态。当所有轴都为0°时,表示关节坐标系的初始位置。
2. 刀具坐标系:用于定义TCP(Tool Center Point,刀尖点)的位置和姿态。需要预先设定,通常基于机械接口坐标系。
3. 世界坐标系:固定在机器人安装位置的空间坐标系,作为其他坐标系的参考。
4. 用户坐标系:用户可以根据作业需求定义的笛卡尔坐标系,用于位置数据的示教和执行,增加了操作的灵活性。
程序创建涉及将这些坐标系和指令结合,以编写控制机器人动作的程序。动作指令包括基础的移动和定位,焊接指令则针对特定的焊接应用,比如弧焊或点焊。摆动指令允许机器人在执行任务时进行额外的摆动动作,增加工作范围和灵活性。寻点指令则是让机器人找到特定位置的命令,这对于自动化的生产线和物料搬运至关重要。
了解并熟练运用这些概念和指令是有效操作FANUC机器人、提高生产效率和确保安全性的关键。通过详细阅读和实践这份操作说明书,用户可以逐步掌握FANUC机器人的全方位操作技巧。
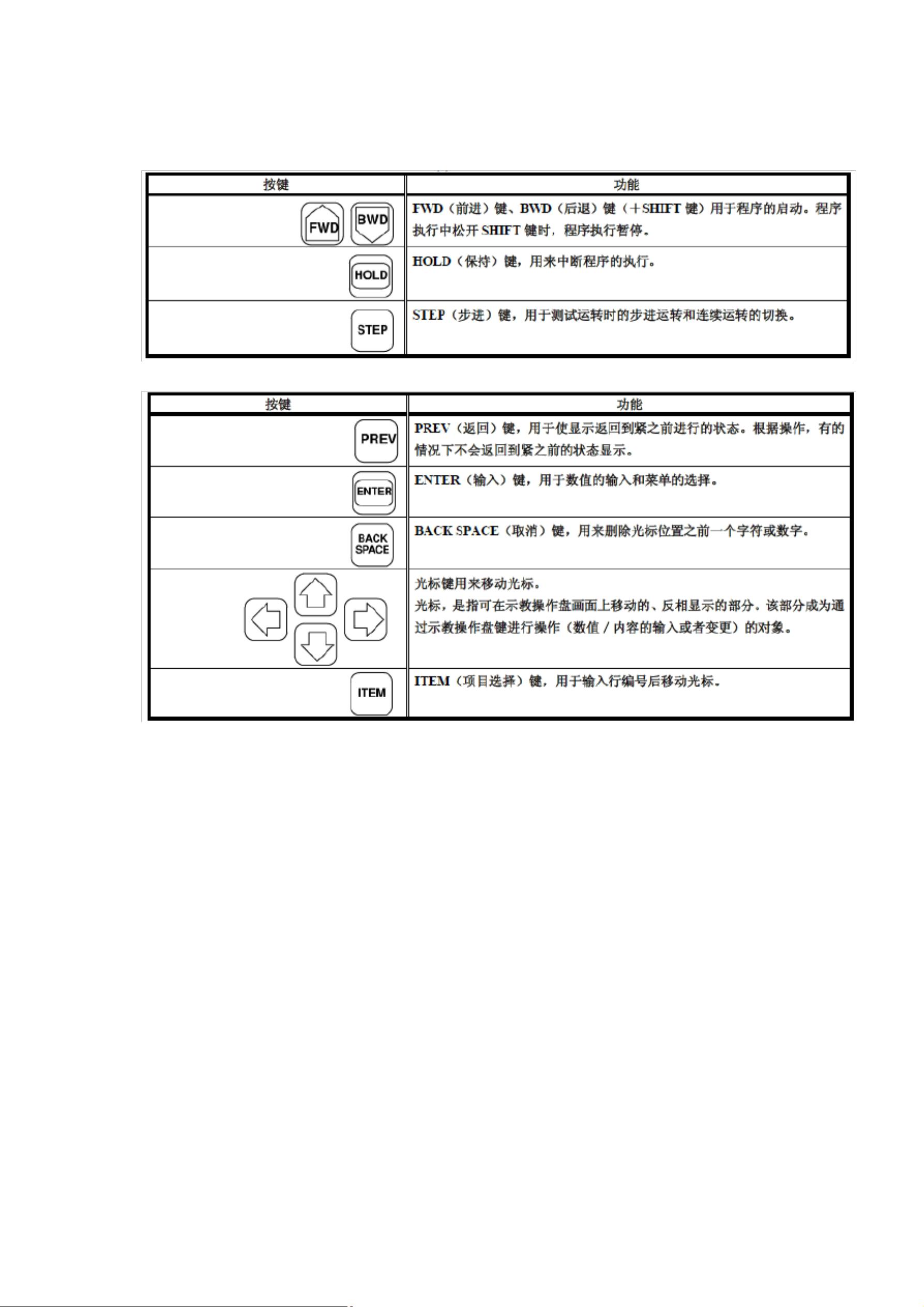
与执行相关的键控开关
与编辑相关的键控开关
word 文档可编辑
剩余29页未读,继续阅读
2022-05-13 上传
2023-07-12 上传
2021-09-22 上传
2023-03-02 上传
2023-09-11 上传
2021-08-04 上传

苦茶子12138
- 粉丝: 1w+
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
