"MATLAB和Simulink高效设计机械臂算法与应用程序开发"
需积分: 5 77 浏览量
更新于2024-01-26
收藏 4.13MB PDF 举报
机器臂的仿真是学习和研究机器臂技术的重要步骤。在这个过程中,MATLAB和Simulink是非常强大的工具,可以帮助我们高效地设计机器臂算法,并为机器臂开发自主应用程序。
概述机器臂工作流程是理解机器臂仿真的关键。工作流程包括运动学、动力学、电机控制、路径规划和任务规划等方面。在机器臂的工作流程中,感知用户输入(如声音等)是一个很重要的环节,它可以提供外界环境信息,并根据用户的指令执行相应的动作。而路径规划和任务规划则是机器臂在执行特定任务时的关键步骤,它可以帮助机器臂在给定的约束条件下,生成合适的轨迹规划并完成任务。
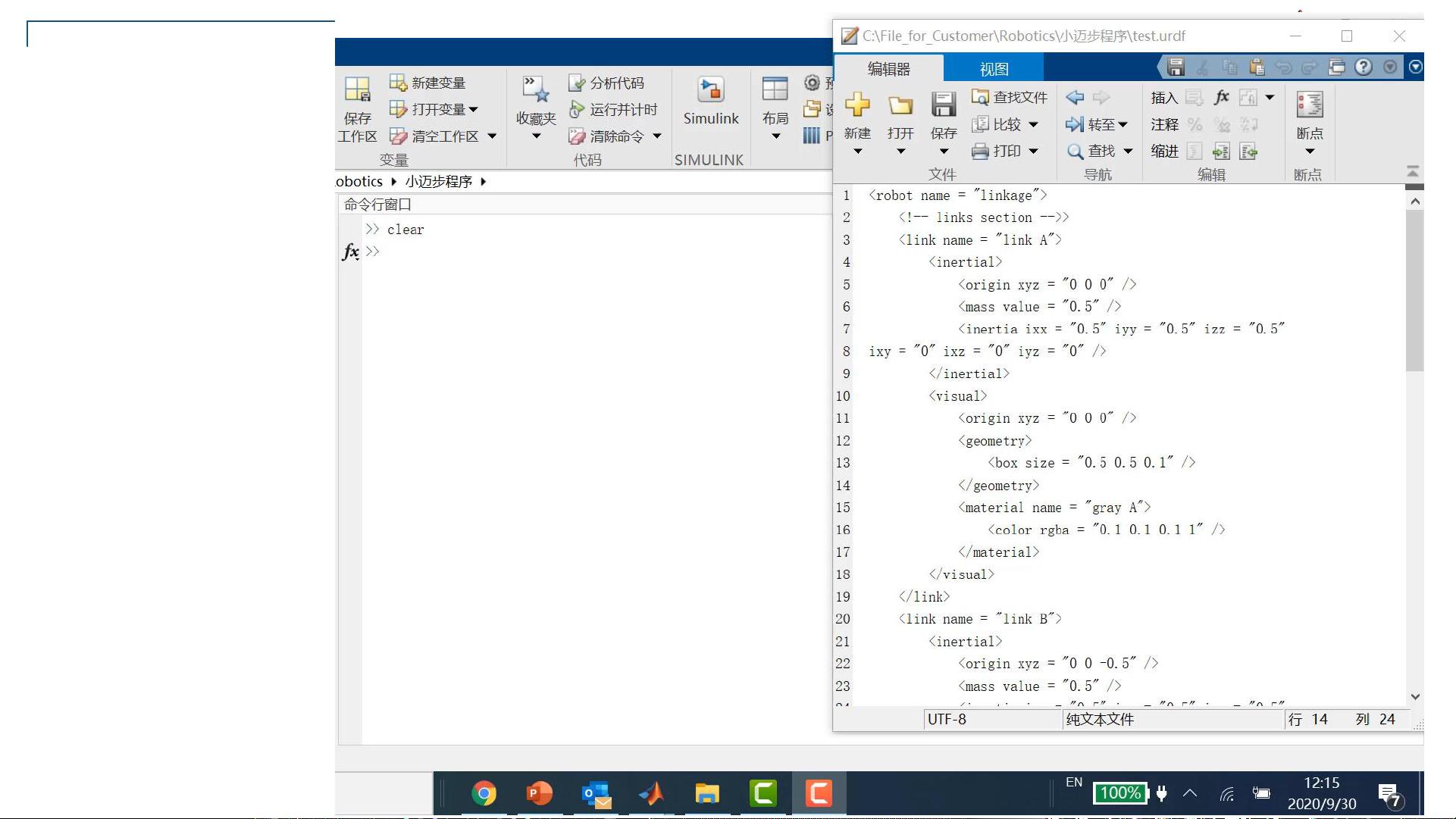
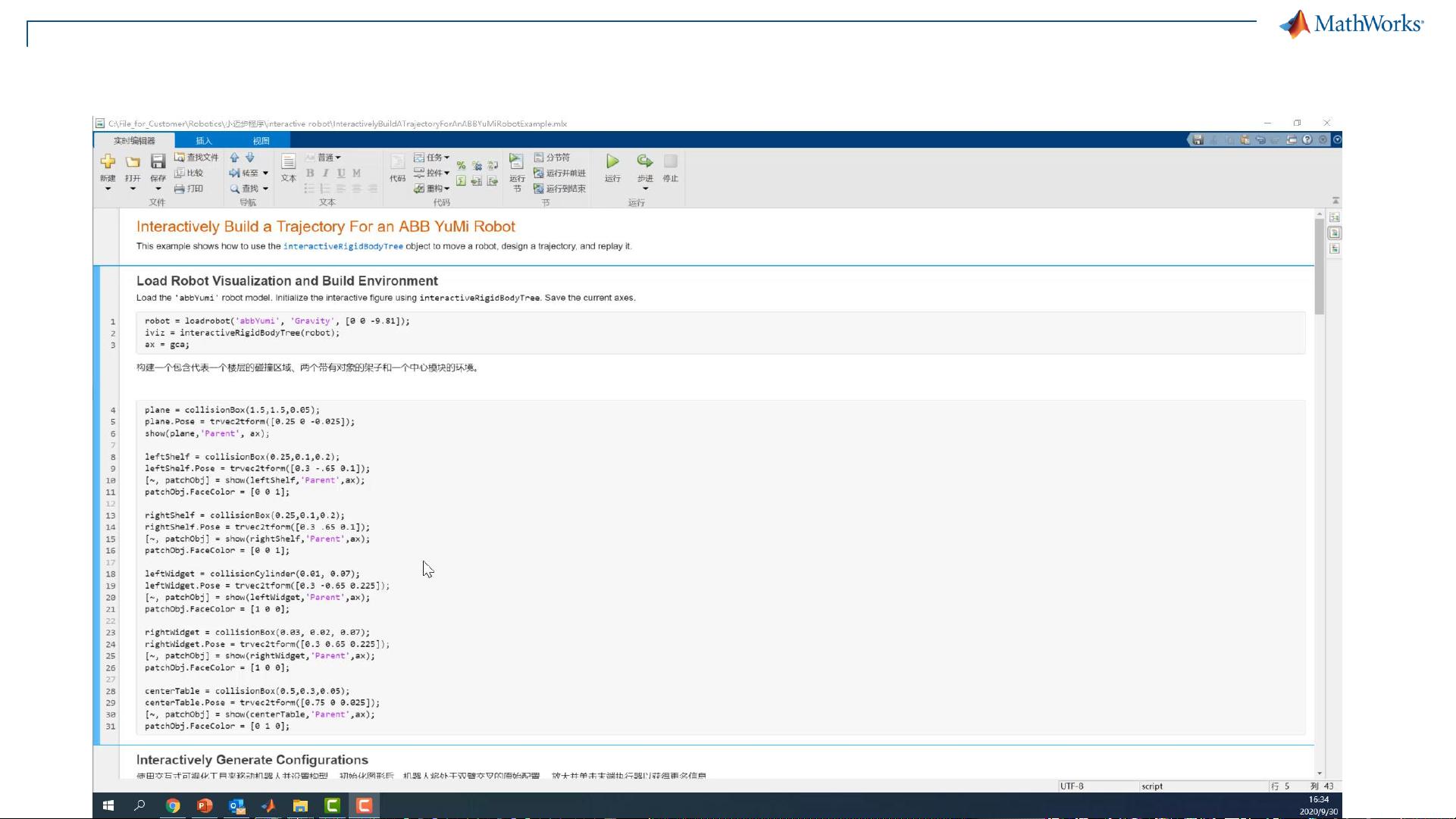
在机器臂的表示方法方面,我们可以使用URDF文件来描述机器臂的结构和参数。URDF文件是一种通用的机器人描述文件格式,可以将机器臂的结构信息导入到刚体树对象中。通过使用URDF文件导入,我们可以很容易地在MATLAB中建立交互式的刚体树模型,并对机器臂进行仿真分析。
此外,我们还可以从常用的CAD工具中导入模型,如使用Unreal引擎开发的拾取和分拣应用。这可以帮助我们更加方便地设计机器臂的工作流程,并与外部的机器人模拟器进行连接。
了解机器臂的运动学和动力学是进行仿真研究的基础。运动学和动力学可以帮助我们理解机器臂的姿态和运动规律,以及机器臂在执行任务时所需要的力和能量。掌握机器臂的运动学和动力学方程,可以帮助我们更好地设计机器臂的控制算法,并进行仿真分析。
在机器臂的任务规划方面,我们可以使用多种不同的方法和算法。比如,可以使用逻辑顺序、避障和避免碰撞等方法来生成合适的轨迹规划。还可以使用3D RRTs、多项式、梯形、SLERP等方法来实现不同的任务规划。此外,还可以使用带约束的逆运动学、逆动力学、Jacobian、PID、MPC等控制算法来完成任务规划。
在机器臂的工作流程中,还可以使用计算机视觉和深度学习等技术来帮助机器臂感知外界环境,并进行相应的决策和控制。通过将算法设计与自动代码生成相结合,我们可以实现自动化的控制系统,并为机器臂开发用户界面和自主应用程序。
总结起来,机器臂的仿真是学习和研究机器臂技术的重要方法。MATLAB和Simulink是非常有力的工具,在机器臂的仿真分析中起到了非常重要的作用。通过了解机器臂的工作流程、表示方法、运动学和动力学,以及任务规划等方面的知识,我们可以更好地设计机器臂的控制算法,并进行仿真分析。同时,结合计算机视觉和深度学习等技术,可以进一步提高机器臂的感知和决策能力。最后,通过自动代码生成等方法,可以实现机器臂的自主控制,并为机器臂开发自主应用程序。
7
URDF文件导入
剩余37页未读,继续阅读
2012-03-07 上传
2023-08-06 上传
2022-04-10 上传
206 浏览量
2014-08-16 上传
2011-07-23 上传

harveyhan
- 粉丝: 8
- 资源: 36
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
