特斯拉Model3用户手册:驾驶与安全功能详解
需积分: 5 53 浏览量
更新于2024-07-09
1
收藏 9.15MB PDF 举报
"特斯拉Model3用户手册说明书详细介绍了车辆的各种功能和操作方法,涵盖了从基本的开启关闭、驾驶设定到高级的自动驾驶辅助系统、充电及保养等多个方面。"
特斯拉Model3用户手册是车主了解并掌握车辆各项功能的重要参考资料。手册首先对车辆进行了概述,包括内部和外部的设计简介,帮助用户熟悉车辆的基本布局。内部部分详细讲解了触摸屏的使用,这是Model3的核心控制中心,可以调整车辆设置、控制温度、导航、媒体播放等。同时,手册还介绍了如何开启和关闭车辆,以及如何操作钥匙和车门。
在驾驶相关部分,手册详细阐述了方向盘、后视镜的调节,以及启动和关闭电源、挡位选择、车灯控制、雨刮器和清洗器的使用。此外,还特别强调了安全功能,如气囊、刹车系统、牵引力控制、驻车辅助和车辆保持功能。对于驾驶辅助系统,如Autopilot自动辅助驾驶,手册提供了深入的介绍,包括主动巡航控制、辅助转向、自动泊车、车道辅助、防撞辅助等功能的原理和操作步骤。
车辆状态和行驶里程优化是手册中的重要一环,其中包含如何使用后视摄像头、行车记录仪、行人警示系统等提升驾驶安全性。此外,手册还提供了关于充电的信息,包括电池信息、充电说明,以及如何通过触摸屏监控车辆电气部件的状态。
在保养维护部分,手册列出了保养时间表,指导用户进行轮胎养护、清洁工作,以及如何更换雨刮器片和清洗器喷头。同时,手册还涉及了车辆负载、尺寸和重量等规格信息,以及在遇到问题时如何联系道路救援。
总体来说,特斯拉Model3用户手册是一份全面且实用的指南,旨在帮助车主安全、高效地使用和维护他们的电动汽车。这份手册不仅包含了日常操作,还涵盖了可能遇到的特殊情况处理,确保车主能够充分利用Model3的各项功能。

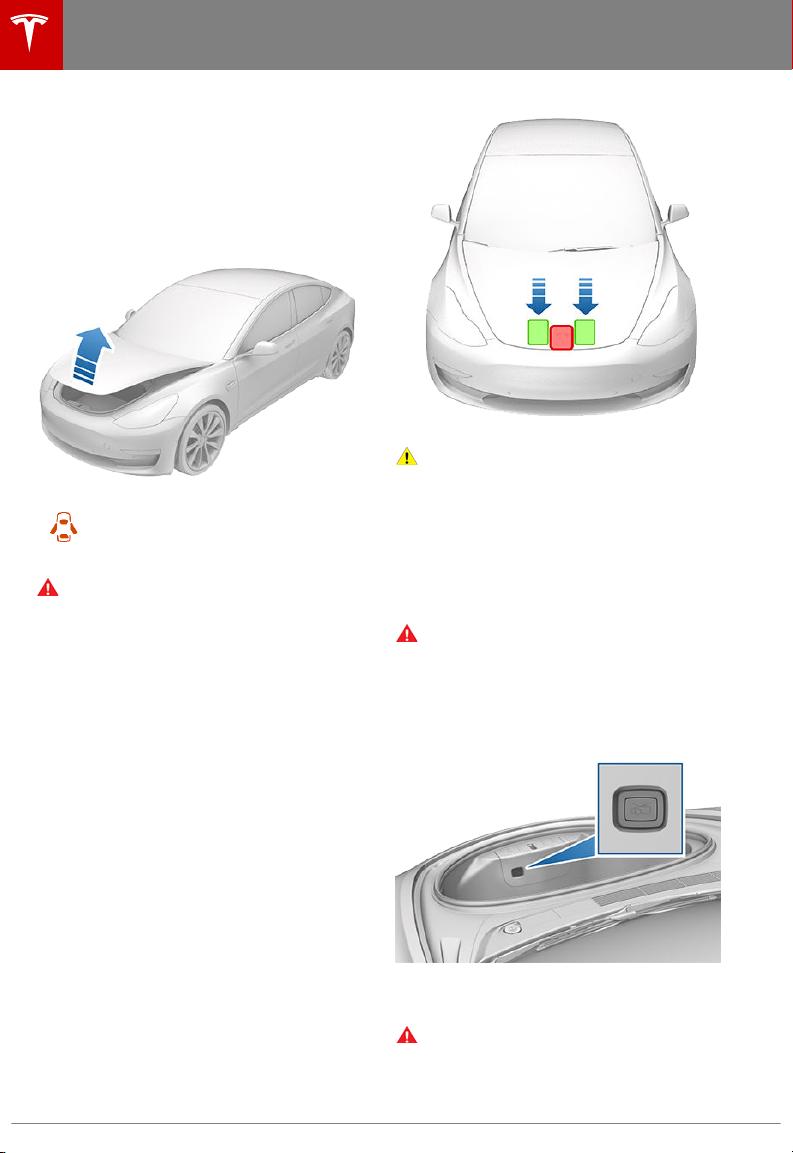
1. 按照箭头的方向按住亮起的按钮以释放门闩。
2. 掀开后备箱。
注: 在短暂暴露在环境光线下时,按钮会散发微光数
小时。
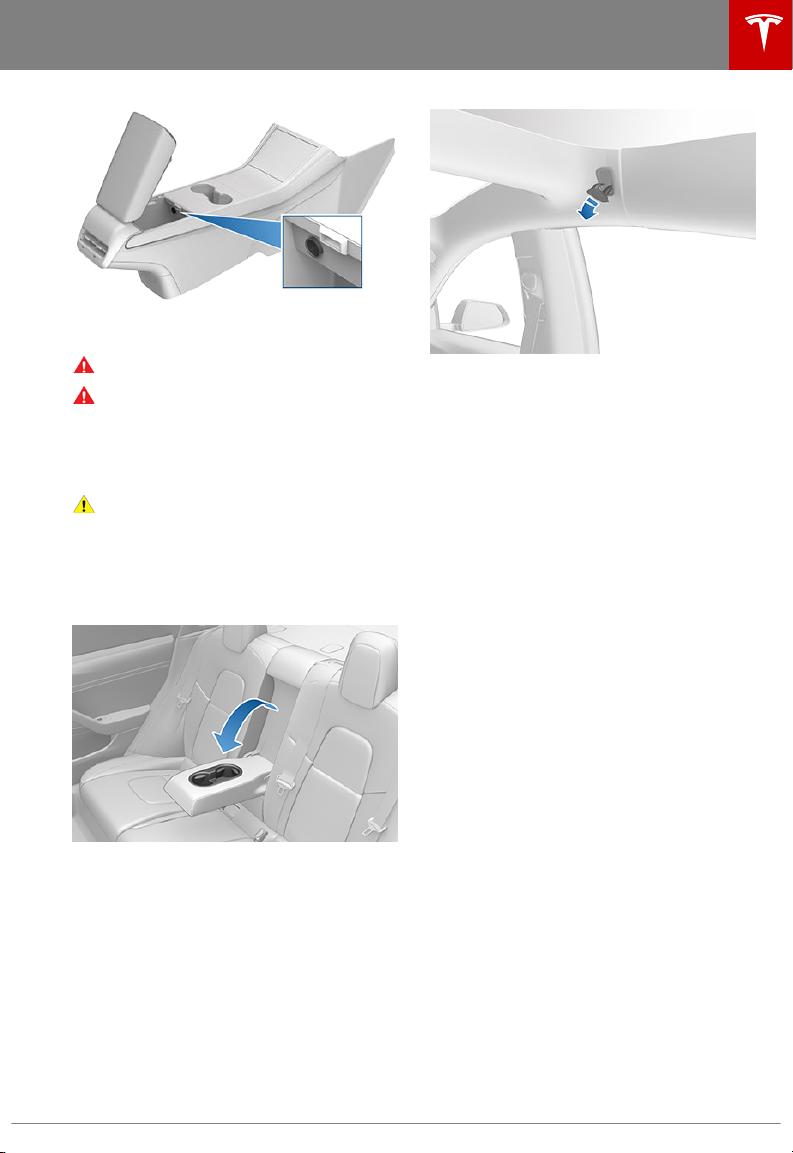
警告: 不让儿童在行李箱中玩耍,也不将儿童反
锁在行李箱中。儿童不系安全带,如遇事故,
可能遭受严重伤害或死亡。如果儿童受困车
内,尤其在温度控制关闭的情况,容易发生中
暑虚脱。
后备箱
开启和关闭 15

剩余150页未读,继续阅读
2019-02-20 上传
2021-08-28 上传
2024-04-05 上传
2024-04-05 上传
2019-10-28 上传
点击了解资源详情
点击了解资源详情

yxy198608111
- 粉丝: 3
- 资源: 22
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
