Pix4Dmapper新手教程:从零开始的航测处理
需积分: 50 180 浏览量
更新于2024-07-17
3
收藏 9.33MB DOC 举报
"Pix4Dmapper教程文档是一个针对新手的零基础操作教程,涵盖了从原始资料准备到成果输出的完整作业流程,旨在帮助用户轻松掌握 Pix4Dmapper 软件进行航测处理的方法。教程内容包括建立工程、导入数据、设置影像属性、快速处理检查、加入控制点、全自动处理、质量报告分析、点云和正射影像编辑输出以及常见问题解答。"
Pix4Dmapper 是一款强大的无人机航测处理软件,适用于地理信息系统(GIS)、测绘、建筑和农业等多个领域。本教程详细介绍了使用 Pix4Dmapper 进行航测数据处理的基本步骤:
1. **作业流程**:
- 整个作业流程包括原始资料准备、工程建立、数据导入、影像属性设置、快速处理检查、加入控制点、全自动处理、质量报告分析、编辑输出成果,以及解决常见问题。
2. **原始资料准备**:
- 原始资料包括影像数据、POS数据、相机文件和控制点数据。确保所有数据完整无误,检查影像质量和POS数据的对应关系。
3. **建立工程和导入数据**:
- 在 Pix4Dmapper 中新建项目,选择航拍项目类型,设置工程名和路径(避免中文字符)。
- 加入影像数据,选择相应的影像文件,并确保路径不含中文。
4. **设置影像属性**:
- 图像坐标系:根据实际POS数据设定,默认为 WGS84 坐标系。
5. **快速处理检查**(可选):
- 对初步处理结果进行预览,确保数据质量。
6. **加入控制点**:
- 提供三种方法:使用像控点编辑器、空三射线编辑器刺点,或使用预测控制点功能标记控制点,以提高处理精度。
7. **全自动处理**:
- 包括初始化设置、点云加密、数字表面模型(DSM)和正射影像(orthoimage)生成,实现自动化处理流程。
8. **质量报告分析**:
- 分析区域网空三误差、相机自检校误差和控制点误差,评估处理结果的精度。
9. **点云及正射影像编辑输出**:
- 编辑点云数据,直接输出成果;编辑正射影像,进行后处理和修饰。
10. **常见问题**:
- 解答了如低精度影像拼接、多工程融合、区域输出成果和项目路径文件结构等问题,帮助用户解决实际操作中可能遇到的问题。
通过这个教程,初学者能够逐步了解和掌握 Pix4Dmapper 的基本操作,从而高效地完成航测数据处理任务。
中海达 Pix4Dmapper 作业手册
4 快速处理检查(可选)
快速处理出来的结果精度比较低,所以快速处理的速度会快很多。因此快速处理建议
在飞行现场进行,发现问题方便及时处理。如果快速处理失败了,那么后续的操作也可能
出现相同结果,即使后续处理成功,得到的成果精度也不高。
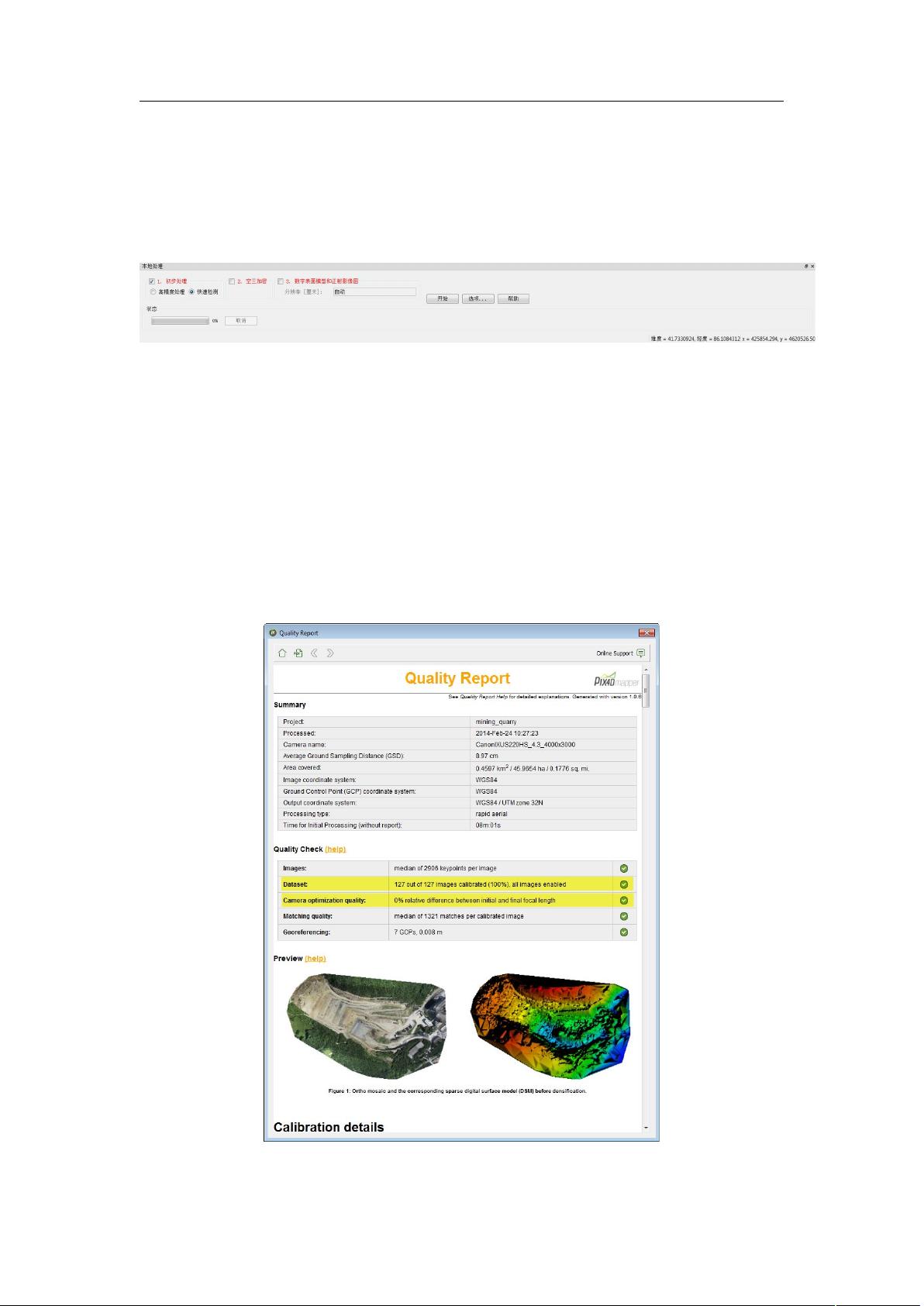
点运行,选择本地处理。设置如下图,初步处理和快速检测选上,其他不选,点开始,
等待软件运行完,可以查看快速处理得到的成果(一张的影像拼图),检查快速处理质量
报告。
质量报告主要检查两个问题,Dataset 以及 Camera optimization quality。
Dataset(数据集):在快速处理过程中所有的影像都会进行匹配,这里我们需要确定大
部分或者所有的影像都进行了匹配。如果没有就表明飞行时相片间的重叠度不够或者
相片质量太差。
Camera optimization quality(相机参数优化质量):最初的相机焦距和计算得到的相机
焦距相差不能超过 5%,不然就是最初选择的相机模型有误,重新设置。
5
剩余22页未读,继续阅读
444 浏览量
934 浏览量
134 浏览量
182 浏览量
783 浏览量
2021-11-18 上传
293 浏览量
点击了解资源详情
点击了解资源详情

rghqw
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 映美GSX230打印机通用驱动v1.3发布,支持Win7
- VHDL实现的数字钟项目代码完整展示
- ProWiki开源Wiki引擎:自定义分层布局和访问权限
- VRay 3.6 for Rhino6汉化版发布:建筑设计渲染神器
- Vue项目common-lib-vue的开发和构建流程
- 深入探讨高速电路设计:SI、PI与EMC案例分析
- Linux下编译ffmpeg解码器so动态库指南
- 飞飞CMS2.8火车头免登陆模块及接口的feifei插件介绍
- 深入探讨pandas-gbq-0.21.0:Python数据分析库的强大工具
- 体外电生理记录低温平台研发及其应用
- 企业荣耀:corpgloria品牌深度解析
- Otto Web Framework深度解析:开源Python网络框架
- WordPress伪静态URL重写组件1.1版本发布
- VC++实现远程桌面信息获取方法
- mod_wsgi 3.5在Windows平台下支持Python和Apache版本集成
- 瓦楞纸板自动堆码装置设计与应用
