史陶比尔机器人系统U盘备份与恢复指南
"该教程详细介绍了如何使用U盘对史陶比尔机器人系统进行备份和恢复,以及维护方法。由张华君撰写,适用于2014年12月19日。"
在工业自动化领域,史陶比尔机器人被广泛应用于各种生产线,其稳定性和可靠性是其核心优势。为了确保机器人的正常运行并预防潜在问题,定期备份和恢复系统至关重要。本教程主要针对史陶比尔机器人用户,提供了一套详细的步骤来指导用户进行这项操作。
首先,进行系统备份是为了保护机器人的当前设置和程序,防止因软件故障、硬件损坏或其他不可预见的情况导致的数据丢失。推荐在每次对机器人控制器进行改动,如重新校准、修改通信配置之后,或者在机器人系统运行正常时定期执行备份。
所需工具包括一个能够被控制器识别的U盘,建议使用FAT格式,因为这是大多数控制器都支持的格式。此外,还需要史陶比尔的Maintenance Software Toolkit(MST工具包),它包含了创建USB启动盘的工具,可以在控制器出现问题时用来启动系统,并提供了一个用于从备份文件恢复系统的程序。
备份过程如下:
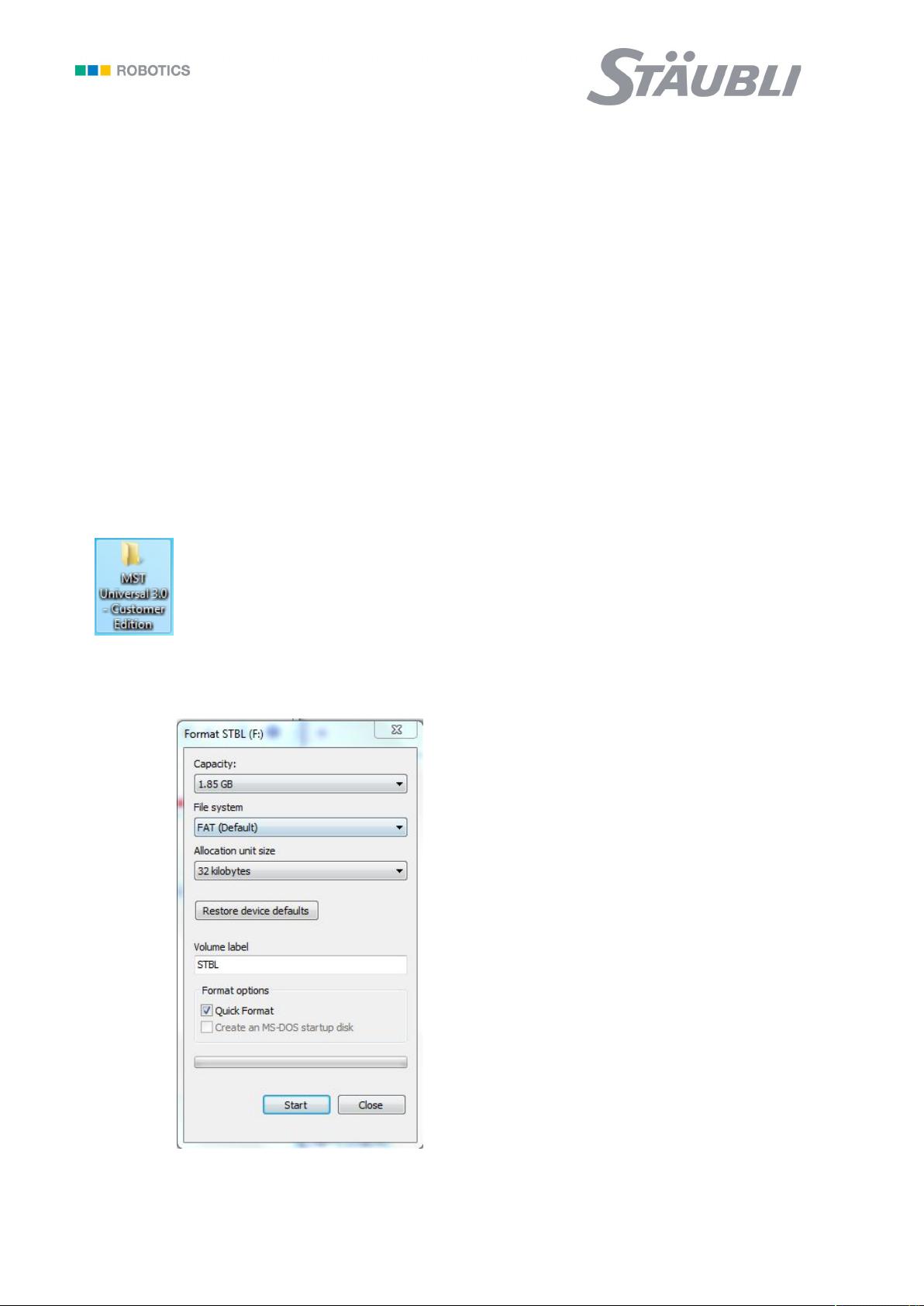
1. 首先,确认U盘已经被控制器识别。如果不确定,可以将U盘格式化为FAT格式以确保兼容性。
2. 将U盘插入控制器的USB端口。对于CPU型号为MM1的控制器,可以选择任意四个USB端口;而对于CPU型号为MEN007或MEN07N的控制器,应使用左侧的两个USB端口。若不确定CPU型号,可以在控制面板的控制器配置中查看版本信息中的CPU详情。
3. 接着,通过控制面板进入控制器配置,然后选择F8备份选项来开始备份过程。
在系统崩溃或需要恢复到已知良好状态时,可以使用之前备份的文件进行恢复。这个过程通常涉及插入带有备份文件的U盘,然后启动控制器的恢复程序,按照指示进行操作。
定期备份和恢复是机器人维护的重要组成部分,可以显著降低因系统问题导致的停机时间。遵循本教程提供的步骤,用户可以有效地管理和保护他们的史陶比尔机器人系统,确保生产效率和设备的安全性。
STAUBLI ROBOTICS TRAINING
Written by
张华君
2014.12.19
1
/
8
史陶比尔(杭州)精密机械电子有限公司
杭州经济技术开发区围垦街 123 号(翔龙路口) - 邮编 310018
电话 +86 4006670066-1307
传真 +86 571 86912577
www.staubli.com.cn
利用 U 盘备份与恢复机器人系统教程
前言:
此文档适用于用 U 盘备份与恢复机器人系统。推荐客户在每次修改过机器人控制器内容后(重新校
点、修改通信配置等),使用 U 盘进行系统备份。或则机器人系统正常工作时,定期使用 U 盘进行系统备
份。当系统崩溃的时候,可以利用先前备份的系统,用 U 盘对机器人系统的恢复。
需要工具:
1. 能够被控制器识别的 U 盘(推荐使用 FAT 格式)
2. MST 工具包(Maintenance Software Toolkit)
此工具包是用于制作史陶比尔机器人控制器的通用 USB 启动盘,在控制器系统出现问题时,可以借助它
启动控制器,此工具包还包含一个可以从机器人备份文件,恢复系统的程序。
系统备份:
1.确认 U 盘能被控制器识别,推荐客户把 U 盘格式化成 FAT 格式
下载后可阅读完整内容,剩余7页未读,立即下载
678 浏览量
355 浏览量
2022-06-18 上传
2022-06-18 上传
813 浏览量
2195 浏览量

A_young_bird
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 抄算组抄表员考核内容和评分标准XLS
- jdk-11.0.10.zip
- pytorch-blockswap:块交换代码(ICLR 2020)
- algorithm
- Keras数据集.7z
- 360炫酷网址导航
- 公司设计管理专职行为规范考评表
- ab并发测试及说明.rar
- 贷款还款预测
- movie_app:React JS基础课程(2021更新)
- PyctureStream:使用Kafka,Spark Streaming和TensorFlow进行图像处理的PoC
- torch_cluster-1.5.6-cp38-cp38-linux_x86_64whl.zip
- Lowrate Screen Sharing-crx插件
- autocomplete:轻松查找英语词典中的单词
- 奥克斯企业文化全案剖析DOC
- CS50x的从零开始的迷宫式革命
