深度学习目标检测:从RCNN到FastRCNN
需积分: 16 13 浏览量
更新于2024-07-15
收藏 18.49MB PPTX 举报
"4.1.目标检测.pptx"
目标检测是计算机视觉领域的一个关键任务,它的主要目的是在图像或视频中识别出特定对象并确定它们的位置。在本PPT中,我们主要讨论了三种主要的目标检测算法:RCNN系列(包括RCNN本身、SPP-Net和Fast R-CNN)、SSD(Single Shot MultiBox Detector)以及YOLO(You Only Look Once)。
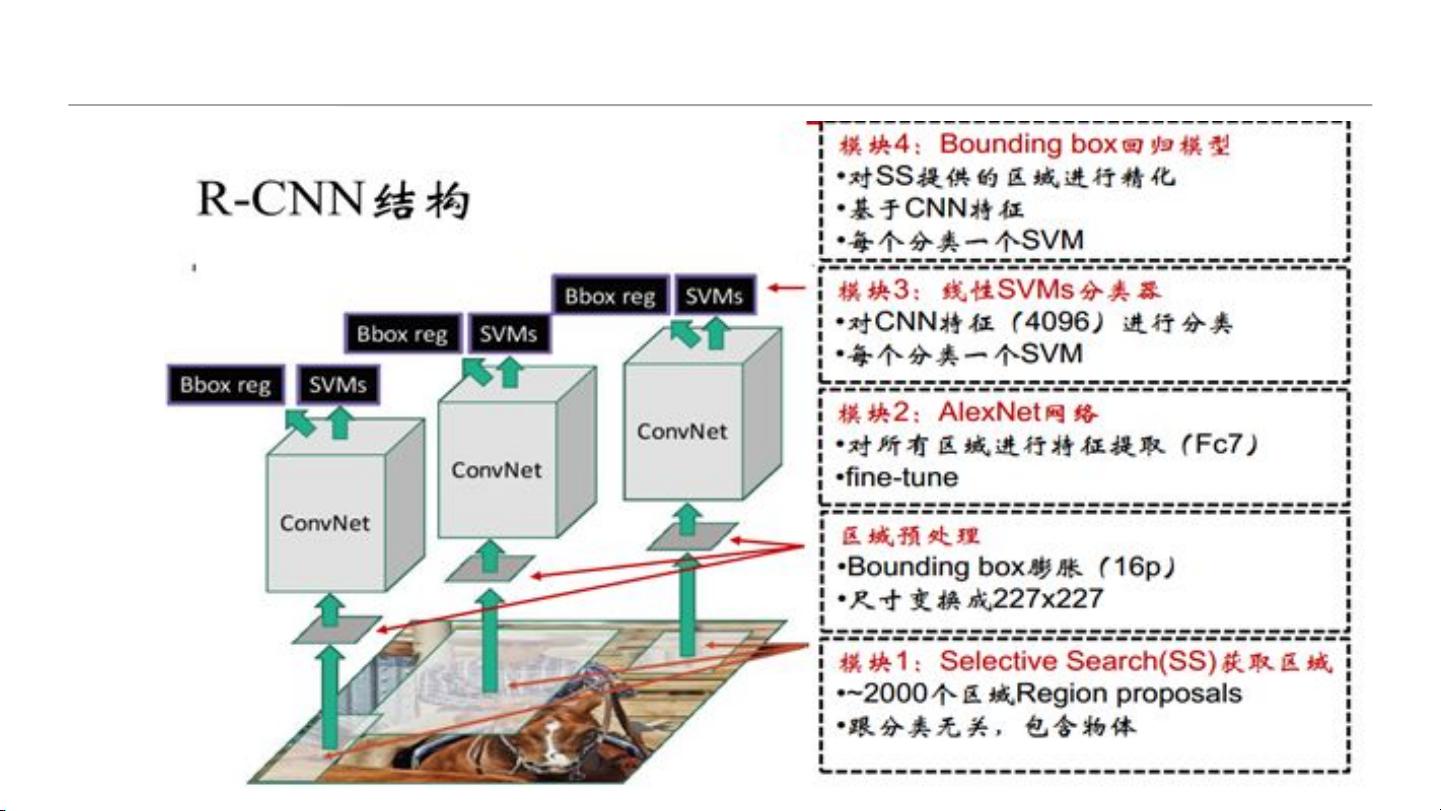
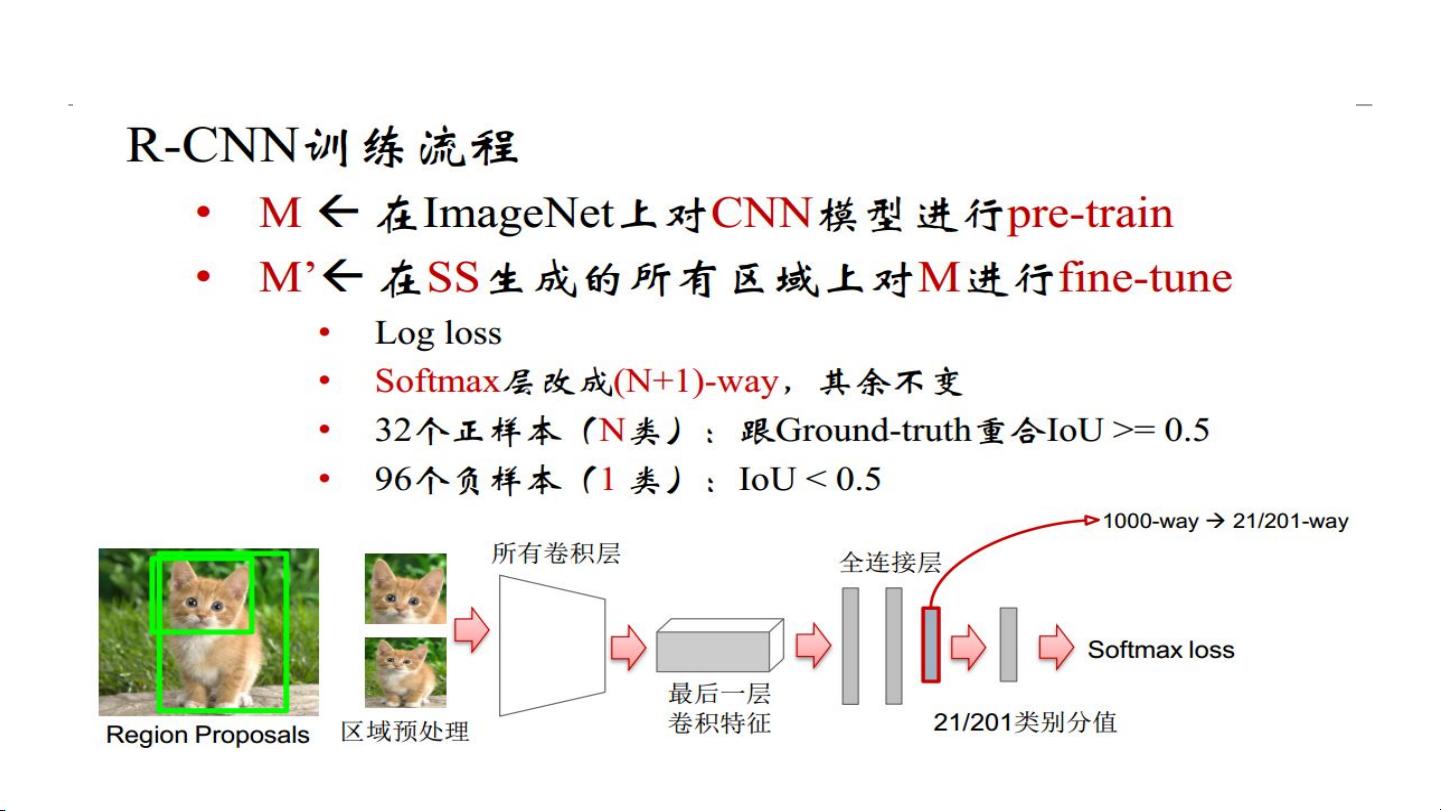
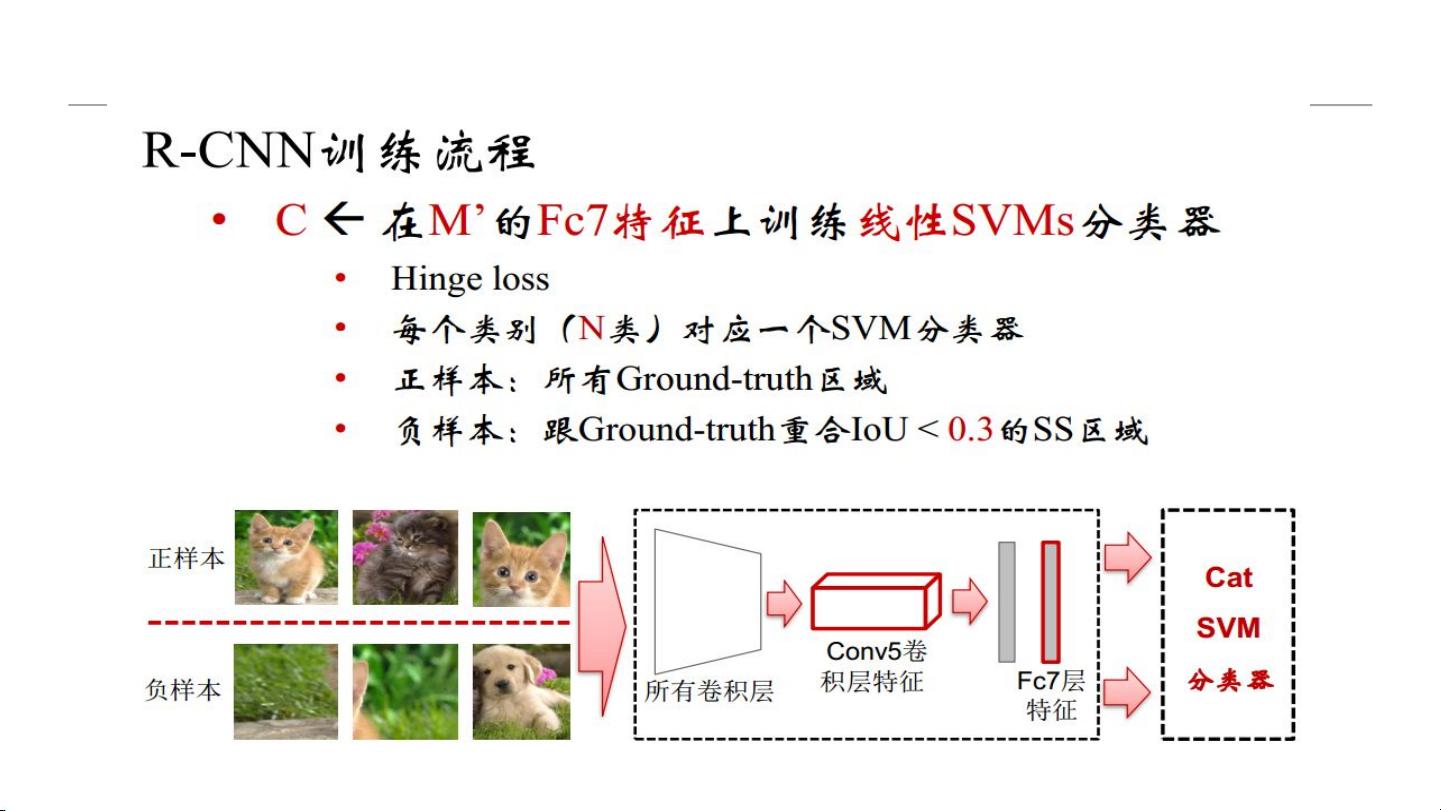
首先,RCNN(Region-based Convolutional Neural Networks)由 Girshick 等人提出,它引入了卷积神经网络(CNN)来处理目标检测问题。RCNN的工作流程包括四部分:选择性搜索(Selective Search)来生成候选区域,使用预训练的CNN提取特征,通过类特定的线性SVMs进行分类,并利用IOU(Intersection Over Union)计算来执行非极大值抑制(NMS)消除重叠的边界框。尽管RCNN在PASCAL VOC数据集上取得了显著的性能提升,但它存在几个主要缺点,如计算效率低、依赖于SVM模型以及训练和测试过程分离等。
为了解决这些问题,SPP-Net(Spatial Pyramid Pooling Network)被提出,通过空间金字塔池化层,使得网络可以接受不同大小的输入,同时保持固定尺寸的输出,从而减少了计算重复。这使得模型能更高效地处理候选区域。
Fast R-CNN由Girshick进一步改进,引入了ROI Pooling层,将特征提取和分类合并到一个网络中进行联合训练,极大地提高了训练和测试的速度。Fast R-CNN采用多任务损失函数,允许同时优化分类和定位,简化了整个流程。
最后,SSD和YOLO是单次预测的方法,它们摒弃了基于区域的检测框架,而是直接在特征图上预测边界框和类别。SSD通过在不同尺度和位置的特征层上预测框,能够在保持较快速度的同时提供良好的精度。而YOLO则是以其实时处理能力而知名,它将整张图像作为一个单一的输入,并直接输出多个类别的边界框,简化了模型结构,提高了效率。
目标检测的发展历程体现了深度学习在解决复杂视觉问题上的不断进步,从最初的多步骤方法到现在的单次预测模型,这些技术的进步显著提升了目标检测的速度和准确性,为自动驾驶、监控系统、机器人导航等实际应用奠定了坚实基础。
2021-09-23 上传
2023-03-27 上传
2024-04-24 上传
2021-09-25 上传
2024-03-17 上传
2024-06-04 上传
2021-10-03 上传
2024-06-03 上传
2024-05-29 上传

向大牛学习人工智能
- 粉丝: 70
- 资源: 78
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
