六足机器人横向行走步态研究与分析
需积分: 25 8 浏览量
更新于2024-08-13
收藏 1.14MB PDF 举报
"六足机器人横向行走步态研究 (2011年) - 浙江理工大学学报 - 刘连蕊, 张泽, 高建华 - 留学人员科技活动项目 - 六足步行机器人;横向行走三角步态;稳定性;虚拟样机;步态规划"
这篇论文详细探讨了一种新型多自由度六足机器人的横向行走步态。作者们以这种特殊的六足机器人机构为研究对象,旨在规划和分析其横向行走的能力。传统的六足机器人通常采用纵向行走的“三角步态”,但为了提升越障和避障的效率以及增强对复杂地面的适应性,研究者提出了横向行走的概念。
1. 六足机器人结构设计
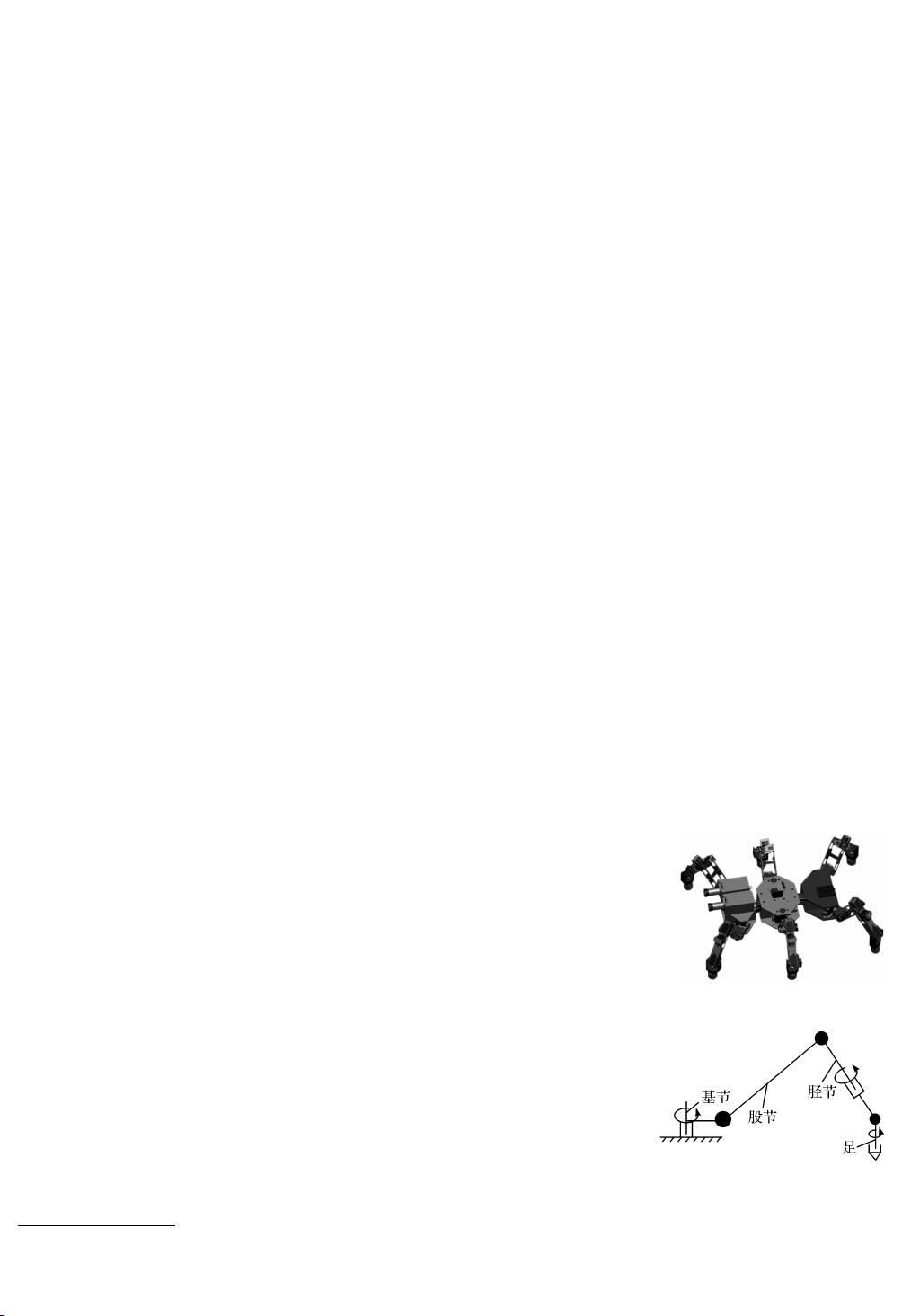
论文中描述的六足机器人具备紧凑的结构,包括基节、股节、胫节和足端等部分,尺寸精确,如图1和图2所示。这种设计允许机器人在保持稳定性的同时,实现更灵活的移动。
2. 横向行走的三角步态规划
研究者规划了一种适用于横向行走的三角步态,这种步态能够使机器人在不改变其基本结构的情况下,实现横向移动。三角步态是通过对每个足部的顺序着地和抬起进行精心设计来实现的。
3. 足端轨迹规划与稳定性分析
在步态规划的基础上,研究者进行了足端轨迹规划,确保每个足部在行走过程中的运动轨迹合理且稳定。此外,还进行了稳定性分析,以验证这种横向行走步态在实际操作中的可行性。
4. 运动学仿真与分析
利用Pro/ E和ADAMS等专业软件,对六足机器人的样机模型进行了运动学仿真。这些工具帮助研究者模拟机器人的动态行为,预测可能的问题,并进行必要的调整。
5. 实验结果与意义
通过仿真分析,研究证明了横向行走步态的可行性,为后续的物理样机实验提供了理论基础和实践指导。这一成果为六足机器人在复杂环境下的移动能力提供了新的解决方案。
关键词涉及六足步行机器人、横向行走三角步态、稳定性、虚拟样机技术和步态规划,表明本研究的核心内容是针对六足机器人的行走模式优化,特别是在横向移动方面的创新研究,这对于机器人在实际应用中的性能提升具有重要意义。
浙江理工大学学报
,
第
28
卷
,
第
2
期
,
2011
年
3
月
JournalofZhe
j
ian
g
Sci-TechUniversit
y
Vol.28
,
No.2
,
Mar.2011
文章编号
:
1673-3851
(
2011
)
02-0225-05
收稿日期
:
2010—09—06
基金项目
:
留学人员科技活动项目
(
浙人社发
[
2009
]
204
号
)
作者简介
:
刘连蕊
(
1986—
),
男
,
河南南阳人
,
硕士研究生
,
主要从事机器人技术及应用方面的研究
。
六足机器人横向行走步态研究
刘连蕊
,
张
泽
,
高建华
(
浙江理工大学机械与自动控制学院
,
杭州
310018
)
摘
要
:
以一种新型的多自由度六足机器人机构为对象
,
研究其横向行走步态
,
规划一种横向行走的三角步态
,
并完成了足端轨迹规划和稳定性分析
。
最后采用
Pro
/
E
和
ADAMS
等软件相结合的方式对六足机器人的样机模型
进行运动学仿真与分析
,
结果证实了该横向行走步态的可行性
,
为接下来的物理样机实验提供了依据
。
关键词
:
六足步行机器人
;
横向行走三角步态
;
稳定性
;
虚拟样机
;
步态规划
中图分类号
:
TP242
文献标识码
:
A
0
引
言
近年来
,
随着经济和技术的发展
,
机器人的研究越来越受到人们的关注
。
六足机器人因其结构简单
、
紧
凑且同时能保证机器人在步行过程中身体平稳
,
步态稳定
[
1
]
而成为机器人领域的研究热点
。
在六足步行机器人的行走过程中
,
最基本的是纵向直线行走
,
纵向行走中的
“
三角步态
”
是大多数人采取
的方法
。
但在越障和避障的过程中
,
让六足机器人实现 横向行走也具有不可取代的意义
。
横向行走可以提
高越障和避障的效率
,
并且也可以进一步提高六足机器人对于复杂地面的适应性
。
1
六足机器人横向行走步态
1.1
六足机器人结构
图
1
六足机器人三维模型
本文所研究的机器人基本结构如图
1
和图
2
所示
,
其中基节长
55.2mm
,
股
节长
110mm
,
胫节长
133.2mm
,
足端长
99.5mm
,
机身宽
200mm
,
机身前后长
456mm
。
现阶段
,
大部分六足机器人的腿部结构都采用
3
自由度的的主流设
计
,
但为了提高六足机器人的越障能力和对复杂地形的适应性
,
本文中所设计的
机器人每条腿都具有
6
个自由度
。
因为对于机器人手臂来说
,
手臂的关节越多
,
机器人就越灵巧
,
能力就越强
[
2
]
。
同样
,
对于六足机器人的腿部结构来说
,
为了
能够适应大千世界中各种各样的未知地形
,
其腿部就要相当的灵巧
。
图
2
腿部自由度简图
1.2
六足机器人步态规划
六足机器人平地行走时一般采用
“
三角步态
”
[
3-6
]
,
每个时刻总有
3
条腿着
地
,
保持了身体的平衡
,
稳定裕度大
。
腿的每一个支撑过程使身体前进一个步
长
,
所以这种步态是直线行走中最快速的步态
,
对于直行的机构往往采用三角
步态
[
7
]
。
为了实现六足机器人的横向行走
,
提高其越障和避障的效率以及对
于复杂地面的适应性
,
这里为其规划了一组横向行走三角步态
,
如图
3
所示
。
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-14 上传
2023-05-12 上传
2023-05-01 上传
2023-05-12 上传
2023-05-28 上传
2023-09-03 上传
2023-06-06 上传
2023-06-09 上传

weixin_38714532
- 粉丝: 2
- 资源: 953
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
