直流无刷电机驱动技术:六步换向与FOC方法
需积分: 0 52 浏览量
更新于2024-08-05
收藏 3.66MB PDF 举报
"本文主要探讨了直流无刷电机驱动的方案,特别强调了六步换向法在BLDC电机中的应用以及霍尔元件在确定电机位置中的关键作用。此外,还提到了正弦波驱动的PMSM电机以及有传感器和无传感器的不同驱动方式,并针对不同功率需求给出了目标尺寸的建议。"
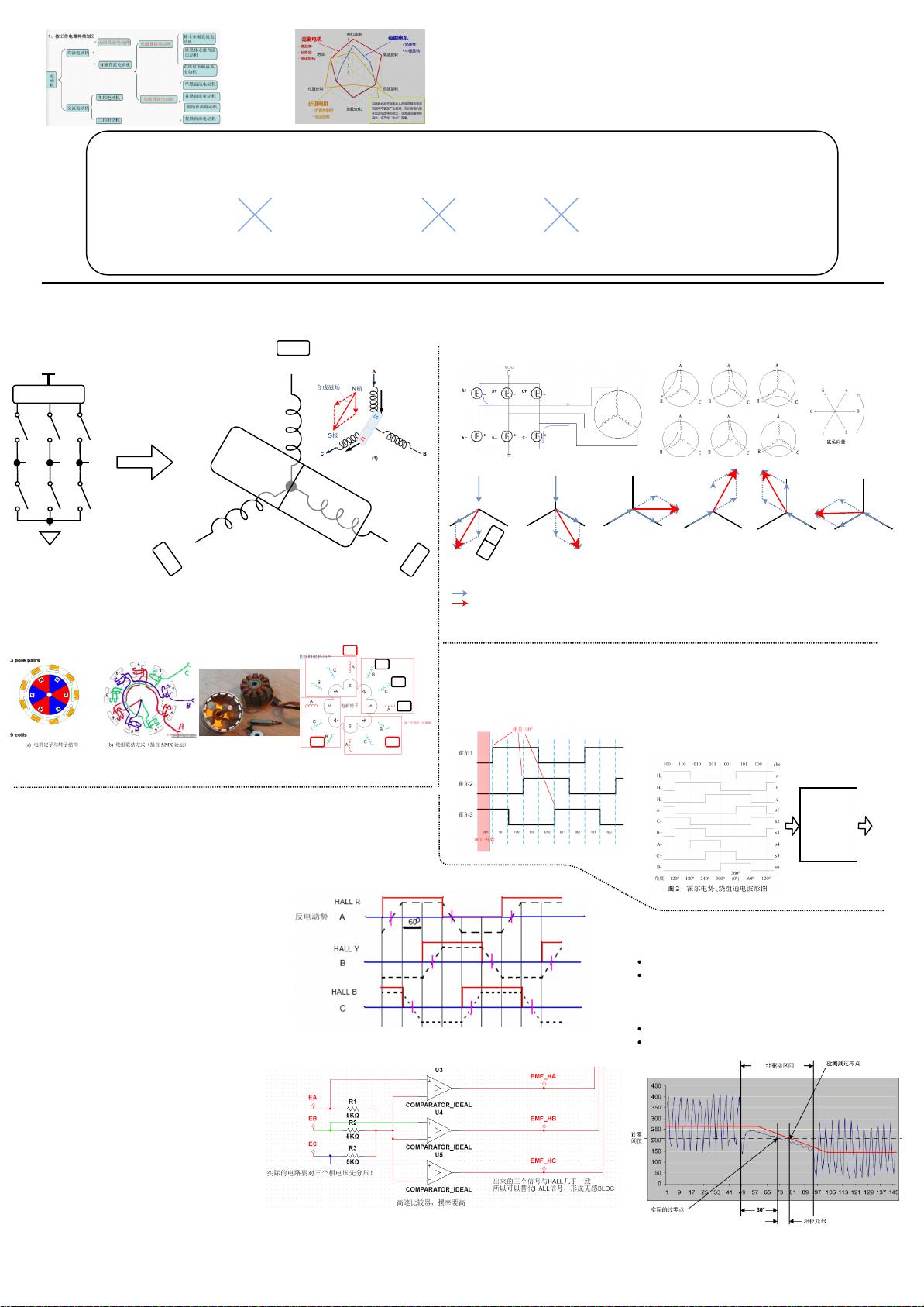
直流无刷电机驱动的核心在于精确控制电机的旋转,以实现高效、平稳的运行。这种电机由定子的三组线圈和转子的永磁体组成。六步换向法是其常见的控制策略,这种方法通过控制线圈的通电顺序,模拟出一个旋转的磁场,使得转子跟随磁场转动。在六步换向法中,每一时刻只有两个开关管导通,通过对高边开关管进行PWM调制来调节电机的转速。
霍尔元件在电机控制中起到关键的作用,它们以120度的电角度间隔布置,能够实时监测永磁体的位置,为控制器提供电角度信息。通过霍尔元件的输出,可以构建出一个真值表或时序图,据此编写MCU软件或设计数字逻辑电路,实现电机的精确换向。
然而,六步换向法存在一定的局限性,由于磁场方向的切换不连续,会导致电流突变和转矩脉动,可能引起电机运行时的抖动、转速不稳定性和噪声。为了改善这些问题,可以采用正弦波驱动的PMSM电机,通过FOC(磁场定向控制)方法,实现更平滑的转矩输出和更高的效率。
在不同功率需求的场景下,电机的尺寸设计也至关重要。小功率电机,如100W上下,目标尺寸可设计为1cmx2cm,而中功率电机,如300W到1kW,目标尺寸则扩大到3cmx5cm。这些设计考虑了电机散热、扭矩密度以及效率等因素。
对于无传感器的驱动方式,即无感BLDC,可以通过反电动势(BEMF)法来估算转子位置,尤其适用于低速场景。这种方式在没有霍尔元件的情况下,利用电机自身的反电动势信号来确定电机状态,简化了硬件结构但增加了软件算法的复杂性。
直流无刷电机驱动方案的选择取决于具体的应用需求,包括功率、精度、成本和控制方式等因素。而无论采用何种方案,都需要精细的软件设计和恰当的硬件配置,以确保电机能够高效、稳定地工作。
MCU软件
控制器
纯数字电路
控制器
方波
BLDC(六步换向法)
正弦波
PMSM(FOC 法)
有传感器
(有感)
无传感器
(无感)
小功率/100W上下
目标尺寸:1cmx2cm
中功率/300W~1kW左右
目标尺寸:3cmx5cm
= ?目标方案
直流无刷电机驱动的架构选择
六步换向法——反电动势为方波/梯形波,适用于 BLDC(直流无刷电机),六步换向法 同一时刻只有两个开关管工作,只对高边进行PWM调制
A相
B相 C相
Ha
Hall元件
S磁极靠近输出1
Hb
Hc
N
S
三路高边测流
VPWR
A B C
一、基本结构(确定好的不宜动):
二、线圈磁场的六种情况(按照①~⑥控制就形成所谓旋转的磁场):
三组线圈为定子;
被线圈产生的旋转磁场所牵引的中心的永磁体为转子;
三个Hall元件以电角度相差120°均匀分布在一组线圈(相邻的A/B/C相为一组)边缘,
可以有效的反应 永磁体/转子 的位置;
线圈饶子数必为3的倍数,永磁体磁极数必为2的倍数;电角度指磁场旋转的角度,机械
角度为转子旋转的角度。
A
B C
A
B C
① ②
30°
120° 120°
30°
60°
通电电流方向
合成磁场方向
A
B C
③
A
B C
④
A
B C
⑤
A
B C
⑥
从A+变为B+为逆时针旋转 从B+变为C+为逆时针旋转 从C+变为A+为逆时针旋转
从B-变为C-为逆时针旋转
从C-变为A-为逆时针旋转 从A-变为B-为逆时针旋转
三、根据霍尔元件测得当前永磁体位置(电角度)而建立出旋转的下一步
的磁场指向从而牵引永磁体转向下一步位置:
当永磁体(逆时针)旋转起来后,三路霍尔
元件的时序图如下:
比如,当前三路霍尔元件(Ha/Hb/Hc)为001,则给线圈绕组
通电的情况应该选择⑥,以此类推,构造出 Ha/Hb/Hc 和
A+/A-/B+/B-/C+/C- 的真值表/时序图(如下图),再根据该真值
表做出相应的 MCU软件 或 数字组合逻辑电路,便可转起来。
A+
A-
B+
B-
C+
C-
Ha
Hb
Hc
方波 BLDC 的问题:磁场方向只有六个方向,切换磁场方向时不连续,硬切(所以是方波/梯形波),
换向时电流突变、转矩脉动较大,铁损较高,电机旋转的抖动、转速稳定性、噪声等性能欠佳。
助记:
四、反电动势 BEMF 法 检测/估计 永磁体/转子 位置(无
感方式),低速场景不可用:
三个霍尔元件可以两种方式放置
(黑色和红色)↑
A+ = a*b_n
C- = a*c_n
B+ = b*c_n
A- = a_n*b
C+ = a_n*c
B- = b_n*c
MCU 软件
或
数字组合
逻辑电路
注意,永磁体的S极靠近的霍尔元件输出1
成本高但灵活性高、
可加智能控制功能
成本低,灵活性低,
单纯让电机转起来
位置传感器,如
三路霍尔元件 或 磁编码器
电机分类
雷达图中列出了各种小型电机的性能比较:
不
言
而
喻
一
目
了
然
星型接法(Y形)在每一时刻会有一相线圈悬空,该线
圈上产生反电动势,该电动势会从上次通电的电平逐
渐减小然后反向继续增大到某值,而当反电动势过零
点的时候,磁体/转子 也转到了 目标位置(估计),然
后即可在这一时刻换下一步;反电动势幅度与转速呈
正相关。
如右图所示,黑色虚线为反电动势波形,红线为霍尔
元件输出波形,紫色小竖线为反电动势的过零点;反
电动势的过零点比霍尔元件输出波形滞后约30°;反
电动势的测量是在电机的三相线上。
右图为将反电动势转换为霍尔元件输出波形的仿
真图,EA/EB/EC 为电机的三相线,三路
EMF_HA/HB/HC 信号可以直接替换 原来 有感 方
波 BLDC 的 霍尔信号,实现无感,减少电机引出
的信号线,只三根三相电机线。
引自 https://mp.weixin.qq.com/s/8fIrK7zdr1_uhpaAfetNMQ
无刷直流电机(BLDC)
永磁同步电机(PMSM)
下文多图源自网络,侵删。
反电动势法存在的问题:
大纹波,需要滤波(硬件或软件)。
过零点检测可能比理想点提前或延迟(如下图),
高要求场景 可以/需要 进行补偿,来更精确的调整
换向时刻。一般来说,高速时检测更精准,低速时
延迟较大。
自启动问题需要对待;有最小速度限制。
大的负载突变可能会失锁。
也可以通过MCU和ADC采集三相电压取平均得到
中点电压,然后再与三路相电压比较得到磁估计
位置。
反电动势法实现无感方波BLDC,省传感器成本、省安装传感器、减少接
线、减少传感器等的检修、让电机可以在浸没环境里运行等等优点。
内转子 外转子
XXD2212
电机实物图
典型外转子
Ha
Hc
Hb
Ha
Hb Hc
S
N
这个图中的磁
体表示转子
转子
反电动势法仅适合非位置控制、
非低速、无较大负载突变场景
查阅 n
2
个资料,几页纸讲清楚 BLDC 和 FOC 基本原理,阳谋予尔!
需要软件算法进行自启动(先自锁
再启动)、估计电角度 和 转速
至少需要获取总电流来防烧
至少需要获取总三相电流(通过测一路或两路)
A+ B- A+ C- B+ C- B+ A-
C+ A- C+ B-
下载后可阅读完整内容,剩余7页未读,立即下载
2024-03-17 上传
178 浏览量
2021-04-22 上传
2018-06-12 上传
2013-12-17 上传
2021-04-21 上传
2022-05-31 上传
781 浏览量

白羊带你成长
- 粉丝: 30
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
