五自由度小型关节型机器人设计与应用
版权申诉
56 浏览量
更新于2024-06-23
收藏 2.46MB DOC 举报
"计算机++装卸料教学机器人设计说明书"
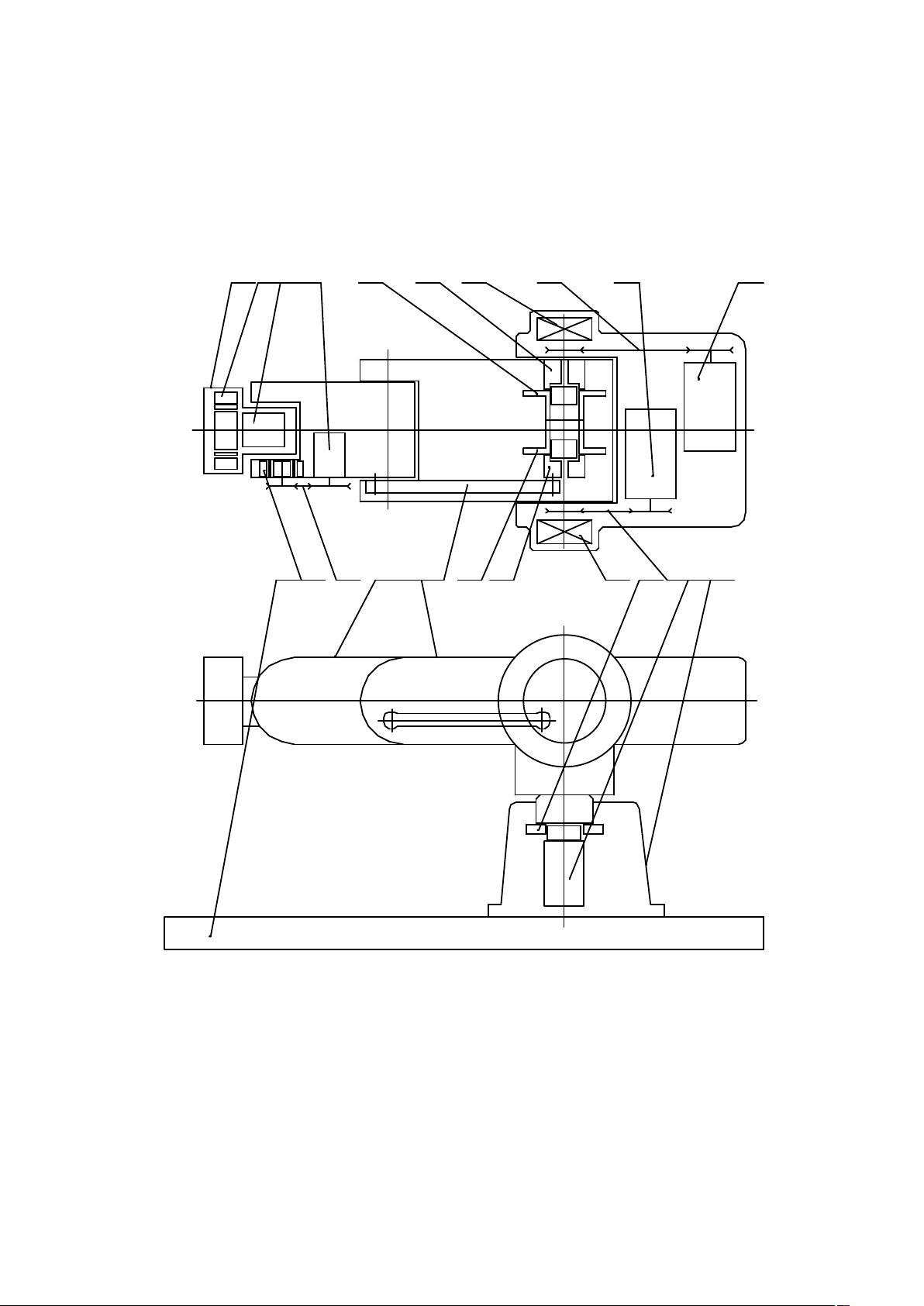
在当今高度自动化的生产环境中,计算机控制的装卸料教学机器人扮演着至关重要的角色。这种机器人,通常称为机械手,是一种结合了机械、电子、控制和计算机技术的复杂系统。本文将详细探讨一个五自由度的小型关节型机器人设计,它专用于自动化生产中的坯料装卸任务。
首先,五个自由度赋予了机器人足够的灵活性,以完成复杂的运动轨迹。腰部旋转允许机器人在水平面上移动,肩部旋转使其能上下移动,肘部旋转则确保了手臂的伸缩,腕部旋转和俯仰使得末端执行器(如夹爪)能在三维空间内灵活转动,以适应不同的取放位置。
设计中,采用了齿形同步带和谐波齿轮减速器作为传动机构,这两个组件的选择旨在优化机器人的性能。齿形同步带提供高效率、低噪音的线性传动,而谐波齿轮减速器则以其高精度和大减速比著称,适合在需要精确控制速度和位置的场合使用。为了减轻重量并降低因重力产生的扭矩,设计时大臂的组件尽可能靠近底座布置。
驱动部分,每个关节都配备了步进电机。步进电机因其位置控制精准、响应快速的特点,是工业机器人中常见的选择。通过精确控制电机的步进,可以实现对机器人动作的精确控制。此外,文中提到的设计灵感来源于日本三菱公司的RV-M1型教学机器人,但在此基础上进行了创新性的改进,以适应特定的应用需求。
关键词:机器人、机械手、步进电机、谐波齿轮减速器
本文的焦点在于如何设计一个高效、灵活且易于操控的教学机器人,不仅模仿了现有先进机器人的设计,还针对特定应用场景进行了改良。这样的研究对于提升我国在机器人领域的技术水平,推动工业自动化进程具有积极的促进作用。同时,这种教学机器人也有助于培养更多具备实际操作经验的专业人才,以满足未来智能制造行业的需求。

第三节 机器人的应用
在发达国家,机器人己广泛地应用于工业、国防、科技、生活等各个领域。产业部
门应用最多的当推汽车工业和电子工业,在金属加工、塑料成型、机械制造等行业也有
普遍应用,并逐渐向纤维加。食品工业、家用产品制造等行业发展。
焊接作业包括点焊和弧焊,是机器人用得最多的作业之一。传统的点焊机虽然可以减轻
人的劳动强度,焊接质量也较好,但它适宜少品种大批量的生产环境,其夹具和焊枪位
置不能随零件的改变而变化,而点焊机器人可通过重新编程来调整空间点位,满足不同
零件的需要,故特别适宜于小批量多品种的生产环境。弧焊作业由于其焊缝多为空间复
杂曲线,故多由人工完成,连续轨迹控制的机器人可以胜任此任务,故广泛用于各种复
杂结构和容器的焊接 。Unimate, Motoman, ASEA 等都是典型的焊接机器人 。
喷漆作业由于环境恶劣,国外大量使用了机器人,挪威生产的 Trallfa 机器人是
目前世界上用得最多的喷漆机器人,该机器人为关节式,6 自由度,电液或全电动伺服
驱动,采用示教再现方式,既可实行点位控制 ,也可实行连续轨迹控制。
搬运物料的作业包括为机床上下料,为自动生产线转运工件,搬运机器人和数控机
床一起组成柔性加工系统,一条柔性生产线可配置几台至十几台搬运机器人,典型的搬
运机器人是 T3 和 Funac 机器人。
机器人用于装配作业是随着视觉系统的发展而发展起来的,电子工业用得最多,主要用
在电路板的装配上,还有电动机、发动机部件、阀门等产品的装配。PUMA 机器人是一
种典型的装配机器人,有 6 个自由度,关节式,直流伺服电机驱动,微机控制点位或连
续轨迹,用 VAL 语 言示教编程,其手腕机构具有顺应性,可克服装配中的误差。
国外的航空航天工业中应用机器人也十分广泛,如铆接装配作业就大量使用了机
器人,此外如电气插头的装配,发动机风扇外壳和高压涡轮的焊接,飞机座舱盖和风挡
钻孔作业,飞机机身和垂直尾翼钻孔,都采用了机器人。某些飞机机身、机舱的喷漆作
业,发动机零部件等离子喷涂也采用了机器人。在空间开发中,航天飞机上收放卫星的
机器人是加拿大 Spar 公司生产的,美国 NASA 实施的火星测计划,发射了两个火星探测
器海盗 I 和海盗 H,它们也是一种机器人,在火星上采集样品,作各种实验,并能将实
验结果发回地球。
在海洋开发方面,美国曾用 Curv 号有缆水下机器人成功地从西班牙附近 900 米深
的海底打捞一颗因 B-52 轰炸机失事掉入水中的氢弹。
挪威卑尔根公司生产的一种水下机器人,可在水下 600 米处作业,装有电视摄像
机,可收集海底标本,切割石油管道和缆索等。
在放射性环境中,如在核电站里,机器人可用来检查、修复管道、阀门等,如日本
东芝公司研制的一种蛇形机器人,具有八个关节,可以在狭小的空间里操作,臂长达
2.25 米,臂顶端装有电视摄像机。
在军事方面,机器人 己用于侦察、布雷、排除爆炸物、装填弹药等。在建筑中,己有
一种爬壁机器人可用来修理墙面,擦洗窗户。此外还有摘果实、挤牛奶、剪羊毛、清理
垃圾、监护病人的机器人等。
总之,机器人的应用面相当广泛,机器人的工作特点是在计算机控制下离开人的干
预进行各项工作。用机器人代替人,可以使人摆脱高温、有毒、粉尘、振动、放射性、
强噪音等恶劣环境,而去从事机器人的监控、维护等工作,使工作性质发生了变化,减
轻了劳动强度,同时也改善了就业结构。机器人工作抗干扰能力强,一心一意按所编程
序工作,动作精度、重复精度高,因此能保证和提高产品质量。解决多品种小批量生产

剩余59页未读,继续阅读
2022-06-30 上传
2023-07-11 上传
2023-07-11 上传
2023-07-13 上传
184 浏览量
2021-10-11 上传
点击了解资源详情

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 点文件:我使用的各种计算机之间共享的点文件
- URLShortenerApp:使用TinyURL的API缩短URL的移动应用程序。 使用NativeScript构建
- UUID.js, 用于JavaScript的符合RFC的UUID生成器.zip
- matlab代码sqrt-ICML2020_SVMHeavy:支持ICML2020模拟的SVMHeavy版本
- BeckerAlliance
- vList.虚拟列表,cpp源码
- readme_generator:自述生成器
- ShopApp
- webGempa:网页设计tentang信息seputar bencana alam gempa dan cara-cara menanggulanginya
- FH,matlab排课源码+数据库连接,matlab源码之家
- wdb_scraper
- BvSshClient-Inst835.zip
- matlab有些代码不运行-NormFace:用于面部验证的L2HyperSphere嵌入式,在LFW上为99.21%
- Matlab对采样数据进行fft变换步骤含代码
- matlab/simulink搭建的电流滞环PWM仿真程序
- fen-eq04,概率数据关联算法matlab源码,matlab
