自平衡两轮车技术详解:硬件、原理与数据融合
版权申诉
153 浏览量
更新于2024-07-21
收藏 4.72MB PPT 举报
自平衡两轮车是一种先进的个人交通工具,以其独特的技术在城市出行和娱乐中备受欢迎。21ic程序匠人的这份资料详细介绍了这种车辆的核心组件和工作原理。以下是主要内容的深入解读:
1. 引子:自平衡两轮车,如Segway,通过同轴两轮设计实现自我平衡,其核心在于姿态控制,即利用内置的惯性导航系统,包括微机电系统(MEMS)中的陀螺仪和加速度计来感知车辆状态。
2. 硬件框架:硬件主要包括单片机(如SH88F2051)、电源(3V或5V)、加速度传感器MMA7361L、陀螺仪ENC-03M、电机驱动L293D、电机测速H42B6以及用于检测环境的直射式红外光电传感器。MCU负责处理各种传感器数据,并通过JTAG接口进行编程和调试,同时通过串口传输数据。
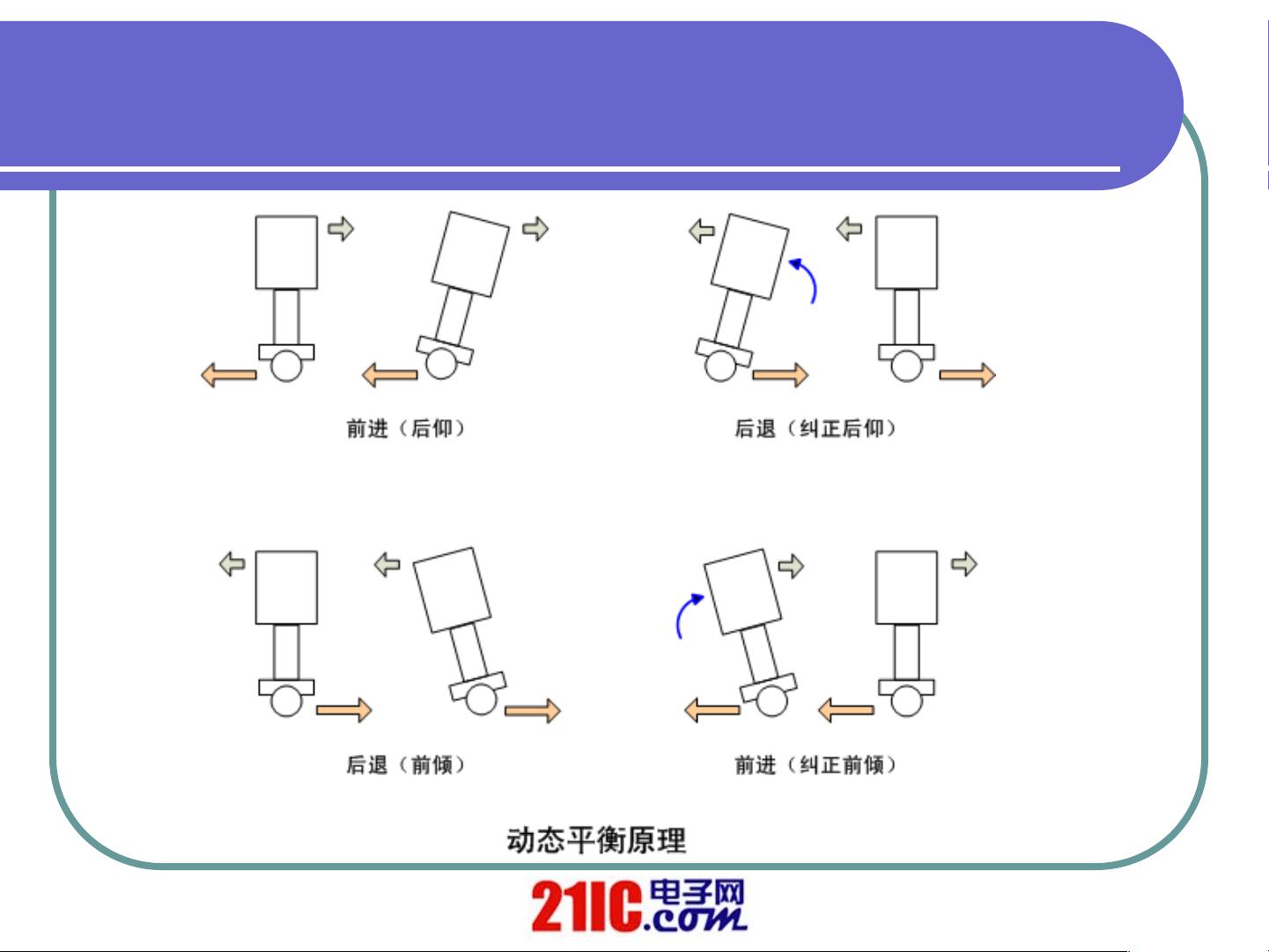
3. 平衡原理:关键在于实时监测加速度和角速度,加速度传感器用于测量线性和静态加速,而陀螺仪则捕捉动态旋转运动。通过算法计算,如利用单轴信号求得的角度公式,以及双轴信号处理来保持车辆稳定。
4. 传感器信号:加速度传感器的优点是长时间稳定性好,但容易受到震动的影响;陀螺仪则在短时间内精度较高,但存在温漂和累积误差的问题。为了提高精度,资料强调了数据融合的重要性。
5. 数据融合与卡尔曼滤波:卡尔曼滤波器被用于整合加速度计和陀螺仪的数据,减小噪声并修正累积误差。加速度计提供长期稳定的角度估计,而陀螺仪的短期准确性帮助纠正滤波器的短期偏差,形成一个更精确的实时角度读数。
6. 卡尔曼滤波简介:这是一种基于概率模型的状态估计方法,通过连续更新和优化预测,使滤波结果随着时间逐渐接近真实值。在自平衡两轮车的控制系统中,它扮演着关键角色,确保车辆在各种路况下都能保持稳定行驶。
7. 挑战与应用:尽管自平衡两轮车技术有其独特优势,但在实际应用中,开发者仍需面对诸如道路不平、风阻等复杂环境因素的影响。持续的研究和优化,如改进滤波算法,对于提升用户体验和车辆性能至关重要。
总结来说,这份资料深入剖析了自平衡两轮车的工作原理,涵盖了硬件设计、传感器数据处理和高级控制策略,对于理解这类交通工具的内部机制以及开发类似产品的工程师具有很高的参考价值。
21/8/12 5
平衡原理
剩余20页未读,继续阅读
2021-07-12 上传
2021-12-18 上传
2021-12-23 上传
2022-12-25 上传
2021-10-07 上传
2021-10-01 上传
2021-08-17 上传
2021-10-11 上传

卷积神经网络
- 粉丝: 363
- 资源: 8440
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
