远近视距两目视觉系统标定技术研究
版权申诉
117 浏览量
更新于2024-06-26
收藏 2.43MB DOCX 举报
"具有远近视距的两目视觉系统标定技术研究"
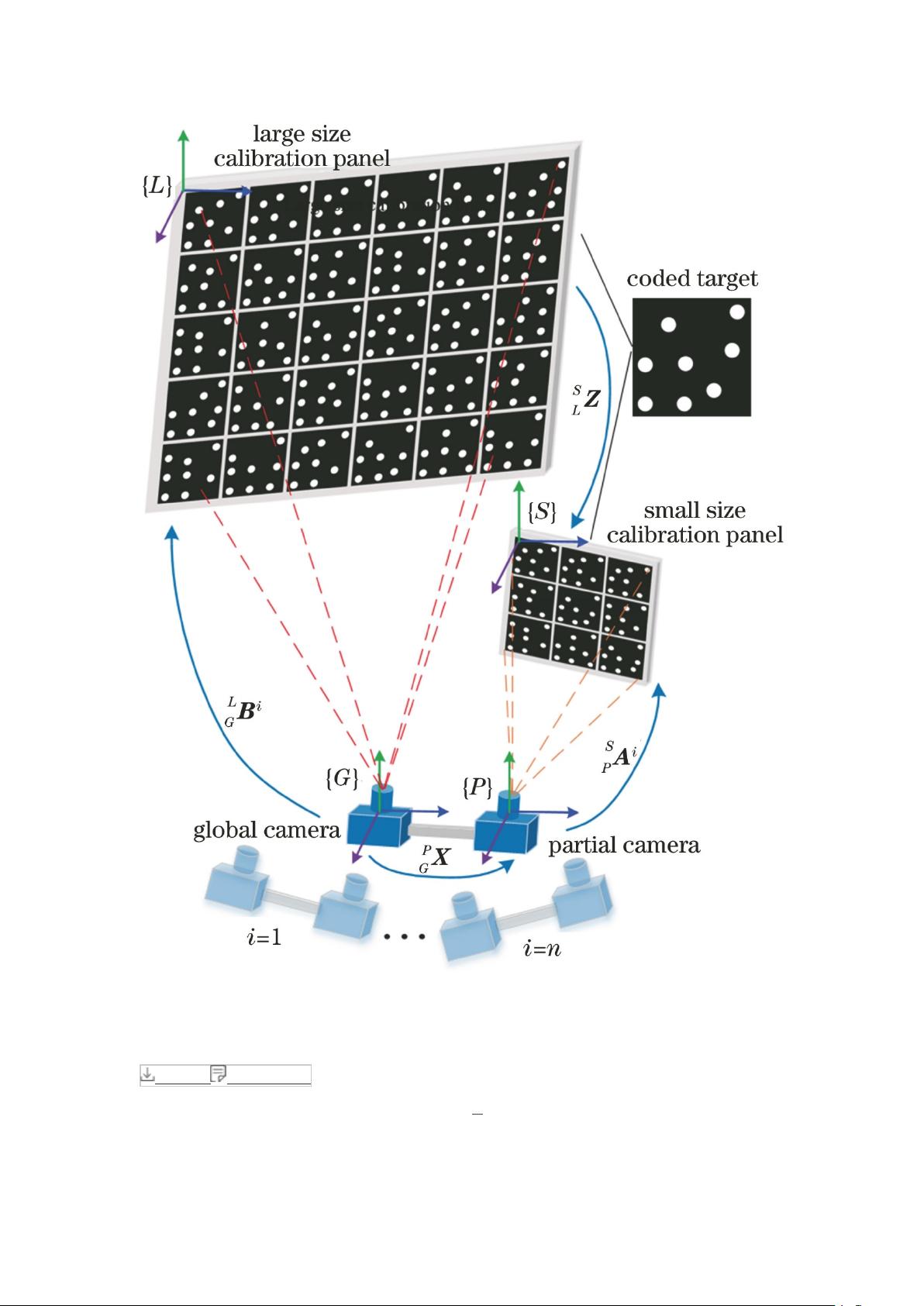
本文主要探讨了在工业机械臂应用中,如何对具有远近视距的双目视觉系统进行有效标定,以实现全局目标定位和局部精确测量。传统的双目立体视觉标定方法不适用于这种特殊系统的标定,因为它们的视场没有交集。因此,作者提出了一个新的标定技术,该技术结合了点阵编码元和多视图几何原理。
首先,为了适应远近视距的两目相机,研究人员设计了两种尺寸的点阵编码元标定板,这些标定板的大小与相机的视场相匹配。点阵编码元是标定过程中的关键元素,它们能够提供丰富的图像特征。为了提高标定的精度,文章中还介绍了一种基于灰度梯度的亚像素边缘检测方法,这种方法可以更精确地确定椭圆(编码元)的中心位置,从而提升特征匹配的准确性。
接下来,利用不同视角下编码元的精确中心像素坐标和图像间的对应关系,通过多视图几何理论,可以解算出两个相机的内参数以及它们相对于各自标定板的转换矩阵。内参数包括相机的焦距、主点坐标等,而转换矩阵则反映了相机在空间中的相对位置和姿态。
然后,通过构建AX=ZB形式的手眼标定方程,可以求解出两目相机之间的外参数。手眼标定是将相机坐标系与机器人基座坐标系关联的关键步骤,它确保了从图像数据到实际空间位置的准确转换。
最后,作者分析了不同的优化方法对减小标定误差的效果,并通过实验验证了优化后的标定技术。实验结果显示,经过优化的标定技术显著提高了精度,角度误差降低到0.05°,位置误差降低到0.36mm,这在工业应用中是非常理想的精度水平。
这项研究提出了一种创新的双目视觉系统标定方法,解决了远近视距相机标定的难题,为工业机械臂在多工位作业中的高效、精准操作提供了技术支持。通过优化的点阵编码元和多视图几何,实现了内外参数的精确计算,提升了整个视觉系统的性能。
剩余19页未读,继续阅读
2022-07-02 上传
2022-07-07 上传
2023-06-19 上传
2023-02-24 上传
2023-06-10 上传
2023-05-30 上传
2023-05-31 上传
2023-09-04 上传
2023-05-31 上传

罗伯特之技术屋
- 粉丝: 4459
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 安然数据-邮件文本.rar
- 基于麻雀算法优化的DVHop
- 蓝桥杯省赛经题目-樱花树_python_
- openshift-shoutcast-cartridge:Openshift 云应用程序的 Shoutcast 分发
- 1.rar_数据结构_Visual_C++_
- PHP实例开发源码—新秀企业网站系统.zip
- DerbyCon-2019Files:这是我计划在Derbycon 2019演讲期间发布的一组工具(如果被接受),或者如果没有则通过博客发布
- 基于机智云的物联网平台的实现.zip(毕设/课设/竞赛/实训/项目开发)
- Adobe After Effects CC 2015影视后期制作技术34 三维空间动画.zip
- Abadakor:官方的Abadakor机器人
- boggle:轻松文字游戏的求解器
- 有阻尼绕组_matlab_citizenvde_空载时的阻尼_
- VimCompletesMe:Vim 的简单选项卡完成
- 802.11wired.zip_单片机开发_Visual_C++_
- guessing-game-real
- 【WordPress主题】2022年最新版完整功能demo+插件v1.4.9.1.zip
