智能公交车自动寻迹控制系统设计
需积分: 9 149 浏览量
更新于2024-09-12
收藏 239KB PDF 举报
"该设计基于STC89C52单片机的智能寻迹小车系统,旨在实现自动驾驶、轨迹识别、语音提示和精确停靠等功能。利用反射式光电传感器跟踪导引线,通过PWM控制马达进行精确速度调节。系统还包括电子站台,实时显示车速、距离和到站时间等信息。发挥部分涉及语音提示、无线通信和更复杂的行驶路径规划。"
本设计主要涵盖了以下几个关键知识点:
1. **单片机控制**:STC89C52是一种常见的8位微控制器,它在系统中扮演了控制核心的角色,负责处理所有传感器输入、决策计算以及驱动电机等任务。
2. **光电传感器**:反射式光电传感器用于识别地面上的导引线。当传感器检测到与其背景颜色差异较大的导引线时,会发送信号给单片机,从而使小车能够跟随轨迹行驶。
3. **PWM控制**:脉宽调制(PWM)是一种控制电机速度的技术,通过改变脉冲宽度来调节电机的平均电压,从而实现对驱动电机的动态精确控制,确保小车能够稳定、准确地行驶。
4. **智能控制算法**:设计中包含了路径识别和自动驾驶算法,使小车能够在指定路径上自主行驶,并在接近公交站点时提前做出反应。
5. **电子站台系统**:电子站台不仅能够接收和显示公交车的信息,还能够实时显示车速、距站距离和预计到站时间,这可能涉及到无线通信技术,如蓝牙或Wi-Fi,以便与小车上的控制单元进行数据交换。
6. **语音提示系统**:为了提供更人性化的服务,设计中要求在到达公交站点时提供语音提示,这可能需要用到语音合成技术,比如文本转语音(TTS)。
7. **无线传输**:在发挥部分中,要求通过无线传输技术在站台上显示公交车的实时信息,这需要单片机与电子站台之间的无线通信协议,如NRF24L01或蓝牙模块。
8. **路径规划**:撤销C站并改至D点,小车需要具备环行和转向的能力,这涉及到更复杂的路径规划算法,可能需要结合PID控制或其他导航算法实现。
9. **精度要求**:小车的停靠位置需精确,误差不超过10cm,这要求精确的定位和控制算法,同时,停车时间和下车提示的时机也需要精确控制。
这个项目集成了单片机控制、传感器技术、电机控制、无线通信、语音处理和智能导航等多种技术,是一个典型的嵌入式系统设计实例。
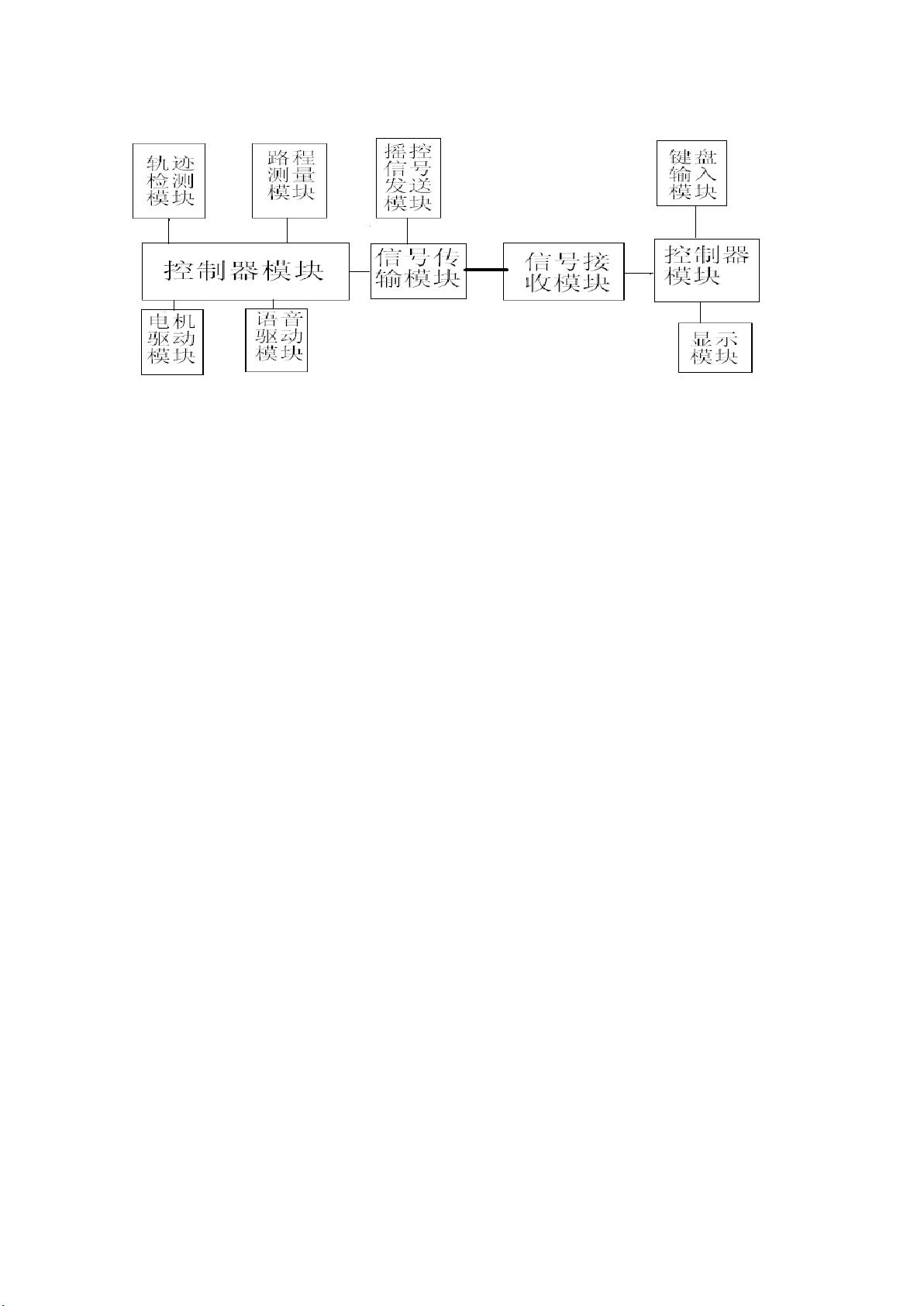
图 1 公交系统结构图
为实现各模块的功能并得到好的性能 , 分别对不同的模块设计多种 方案 并进行
比较论证。
三、 主要模块的 方案 选择与论证
1) 控制器模块
方案一:采用可编程逻辑器件 CPLD
CPLD 可以实现各种复杂的逻辑功能、规模大、密度高、体积小、稳定性高 、 处
理速度快 , 适用于大规模的控制系统 。 本系统不需要复杂的逻辑功能 , 对数据的处
理不是非常高,从经济的角度本设计不采用此方案。
方案二:采用 51 单片机
51 单片机的使用简单、对于小型系统的控制灵活,而 STC 系列的 51 单片机又
具有 ISP 的功能,可以实现在系统编程,调试起来非常的方便,故本设计采 用
STC89C52 单片机作为核心控制模块。
2) 电机驱动模块
方案一:采用继电器驱动
采用继电器对电动机的开关控制 , 通过控制开关的切换速度实现对小车的速度
进行调整 。 这个电路的优点是电路较为简单 , 缺点是继电器的响应时间长 , 易于损
坏,寿命较短,可靠性小 ,故不选用此方案。
方案二:采用专业电机驱动模块驱动
采用双电源驱动 L298N 集成芯片控制输出 , 采用 单片机输出 PWM 波到 L298N 集
成芯片来控制直流减速电机的速度 。 此专用芯片控制简单 , 相应及时 。 故选择方案
二。
3) 轨迹检测模块
方案 一 :采用成品的红外光管
使用已经成品的红外发光管进行轨迹检测 , 当检测到轨迹时 , 输出高电平信号
。
其优点为 : 电路设计中只需提供电源和地 , 设计简单 : 其缺点为 : 当两个红外发光
管位置较近时会发生串扰 , 而位置较远时则会存在较大的 " 盲区 " , 故不选择此方案
方案 二 :采用 TCRT5000
使用 TCRT5000 红外一体化收发管 , 自行设计电路 。 其优点为 : 通过精心设计
,
剩余11页未读,继续阅读
9208 浏览量
139 浏览量
4240 浏览量
203 浏览量
149 浏览量
376 浏览量
156 浏览量
163 浏览量
334 浏览量

轩辕维维
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Stickman Hangman Game in JavaScript with Source Code.zip
- 饭准备的诺拉api
- gopacket:提供Go的封包处理能力
- theme-agnoster
- service_marketplace:Accolite大学项目一个以用户友好且可扩展的方式连接客户和服务提供商的平台
- ssm酒厂原料管理系统毕业设计程序
- backstitch:适用于您现有React UI的Web组件API
- AutoGreen
- Query Server TCL-开源
- MMG.rar_MMG
- Site Bookmark App using JavaScript Free Source Code.zip
- css-essentials-css-issue-bot-9000-nyc03-seng-ft-051120
- Xshell-Personal6.0.0204p.zip
- govim是用Go编写的Vim8的Go开发插件-Golang开发
- Ticker
- xcrczpky.zip_三维路径规划
