




Clion中配置Python环境与运行ROS Python节点
 已收录资源合集
已收录资源合集
需积分: 0 57 浏览量
更新于2024-08-04
收藏 322KB PDF 举报
"这篇教程介绍了如何在Clion中配置Python环境并编写、运行ROS(Robot Operating System)的Python节点。主要内容包括创建scripts目录、配置Python环境、编写代码、赋予脚本可执行权限、项目编译以及运行节点。"
在ROS系统中开发Python节点,首先需要一个合适的开发环境。Clion是一个强大的集成开发环境(IDE),适用于多种编程语言,包括Python。为了创建第一个ROS Python节点,我们需要遵循以下步骤:
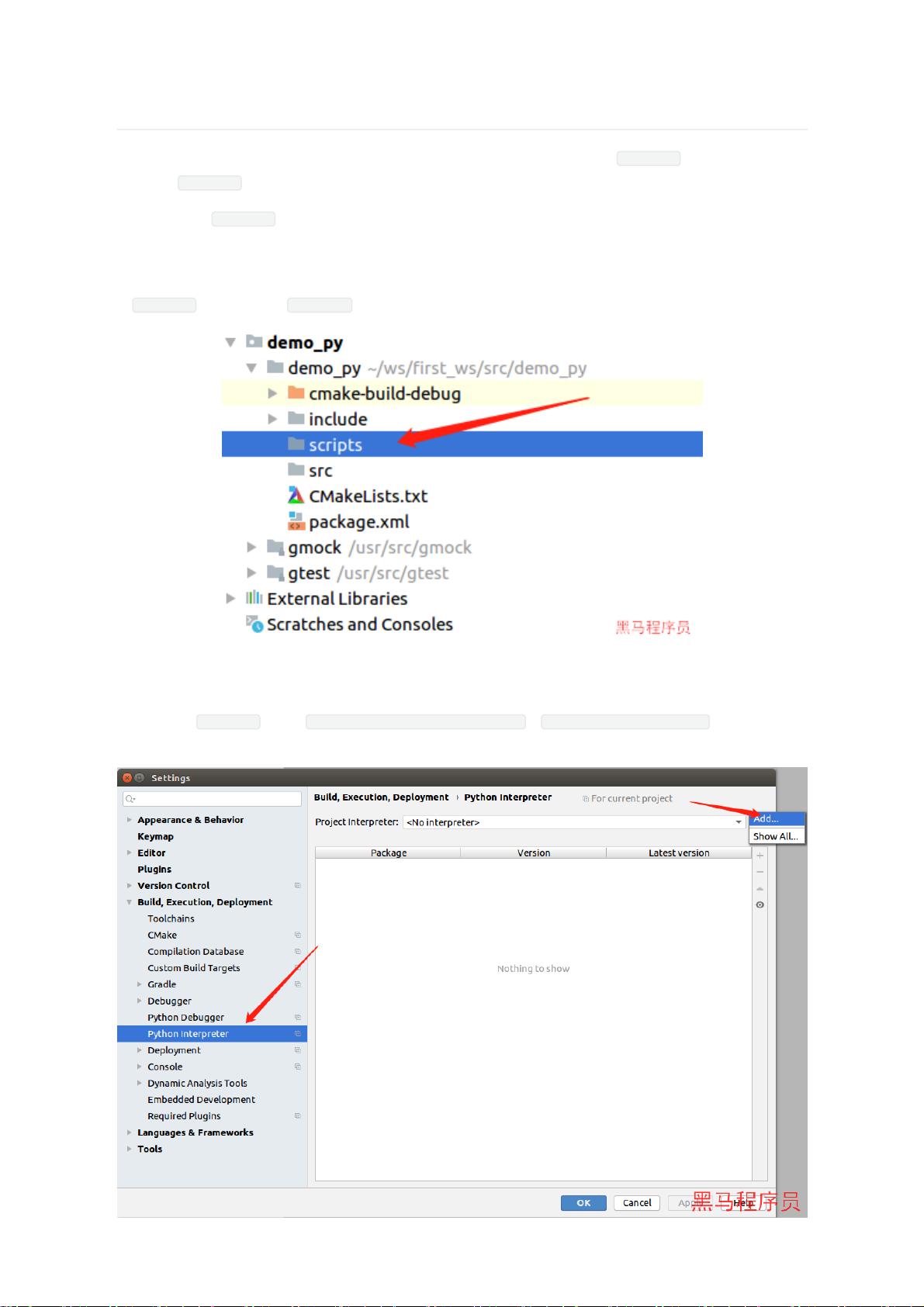
1. **创建scripts目录**:在你的工作空间(workspace)中的包(package)目录下创建一个名为`scripts`的目录,这个目录将存放你的Python源代码。
2. **配置Python环境**:在Clion中,进入`Settings`,然后找到`Build, Execution, Deployment` -> `Python Interpreter`。点击设置按钮,添加Python环境。由于ROS Melodic版本不支持Python 3,你需要选择Python 2.x版本。
3. **编写代码**:在`scripts`目录下创建一个名为`hello.py`的文件,写入ROS节点的基本结构。文件开头的`#!/usr/bin/env python`是一个shebang,告诉系统这是一个Python脚本。`#coding:utf-8`则用来指定文件的编码格式为UTF-8。
4. **可执行权限修改**:由于默认情况下Python脚本没有执行权限,你需要通过命令`chmod +x hello.py`赋予文件执行权限。
5. **项目编译**:在终端中进入工作空间,执行`catkin_make`命令来编译你的ROS项目。这一步骤会确保所有依赖项都正确地链接和构建。
6. **启动ROSMaster**:在另一个终端窗口中,先启动`roscore`,它是ROS系统的中心节点,管理消息发布和订阅。
7. **运行节点**:有两种方式运行你的ROS Python节点。一是通过Clion直接运行,二是通过命令行。在Clion中,可以直接运行`hello.py`;在命令行中,使用`./hello.py`或者`rosrun`命令运行你的节点。
注意,尽管在Clion中开发可以直接运行Python脚本,但推荐进行编译以确保所有依赖都被正确处理。这不仅有助于确保代码的正确性,还能帮助在开发过程中更快地发现和解决问题。
这个教程详细介绍了如何在Clion这个专业IDE中配置和使用Python环境来开发ROS的Python节点,包括从创建项目目录、配置环境、编写代码到运行节点的全过程。这对于初学者掌握ROS系统和Python编程在机器人领域的应用非常有帮助。
下载后可阅读完整内容,剩余3页未读,立即下载
528 浏览量
10619 浏览量
2025-03-16 上传
2025-03-15 上传
106 浏览量
207 浏览量
136 浏览量
131 浏览量
149 浏览量

ai
- 粉丝: 1020
 我的内容管理
展开
我的内容管理
展开








最新资源
- ASP.NET与Access结合的音乐管理系统开发
- 简易新闻发布系统DEMO教程与下载
- Java Spring游戏开发时间线
- Genymotion 3.0.2版本发布及ARM翻译插件下载指南
- C语言编程经典范例源码解析
- ASP v2.0新特性:生成html静态网页
- C语言开发的多功能菜单小程序教程
- AJAX与ASP.NET构建的高效多人在线聊天系统
- Adel开发包接口深度解析:提升程序开发效率
- C++/Java在竞争性编程中的应用与解决方案
- MATLAB开发实现废弃对象检测算法
- AVS2010绿化注册版:SWF反编译工具的真正可用性
- 掌握Microsoft Virtual PC 2007简体中文版安装与设置
- OpenGL必备工具:GLUT库的下载与应用
- 深入浅出C语言实用程序设计100例
- 多功能函数信号发生器:正弦、三角、矩形波形调节






















