自适应随机游走重启动的深度图后处理方法
需积分: 1 157 浏览量
更新于2024-08-04
收藏 13.74MB PDF 举报
"A Depth Map Post-Processing Approach Based on Adaptive Random Walk With Restart"
这篇论文主要探讨了一种基于自适应随机游走重启的深度图后处理方法,这是计算机视觉领域的一个重要研究方向,特别是在立体图像深度估计中。深度图是三维场景重建和理解的关键,它能够提供每个像素在场景中的深度信息。尽管经过十年的发展,深度估计仍然面临准确性挑战,尤其是从立体图像中获取深度信息时。
文章指出,准确的深度估计需要良好的深度层次感和保持结构完整性。为了解决这个问题,作者提出了一个深度后处理框架,该框架以“自适应随机游走重启(Adaptive Random Walk with Restart, ARWR)”算法为基础。随机游走算法通常用于图像分割和标记问题,通过模拟粒子在像素空间中的随机移动来优化目标函数。在这个应用中,ARWR算法被用来细化由其他方法生成的初始深度图。
ARWR算法的核心思想是通过迭代过程不断调整深度值,使其更接近真实情况。在每次迭代中,像素的深度值会依据其周围像素的深度信息进行更新,同时考虑到边缘和结构信息,以避免结构失真。引入“重启”机制是为了防止算法陷入局部最优,确保全局优化效果。这一重启策略允许随机游走过程在一定条件下重新开始,从而提高深度估计的准确性。
该工作得到了爱尔兰科学基金会(Science Foundation Ireland, SFI)的战略合作伙伴计划以及SFI与FotoNation Ltd.联合资助的“下一代智能手机和嵌入式平台成像”项目支持。这些研究结果对于提高智能手机和嵌入式设备的实时三维重建能力具有重要意义,因为它们通常受限于计算资源和功耗。
这篇论文提出的深度图后处理方法利用了自适应随机游走重启算法的优势,提高了立体图像深度估计的精确度,有助于推动计算机视觉技术在智能设备上的实际应用。通过对深度图的精细化处理,可以改善虚拟现实、增强现实、自动驾驶等领域的三维感知性能。
H. Javidnia, P. Corcoran: Depth Map Post-Processing Approach
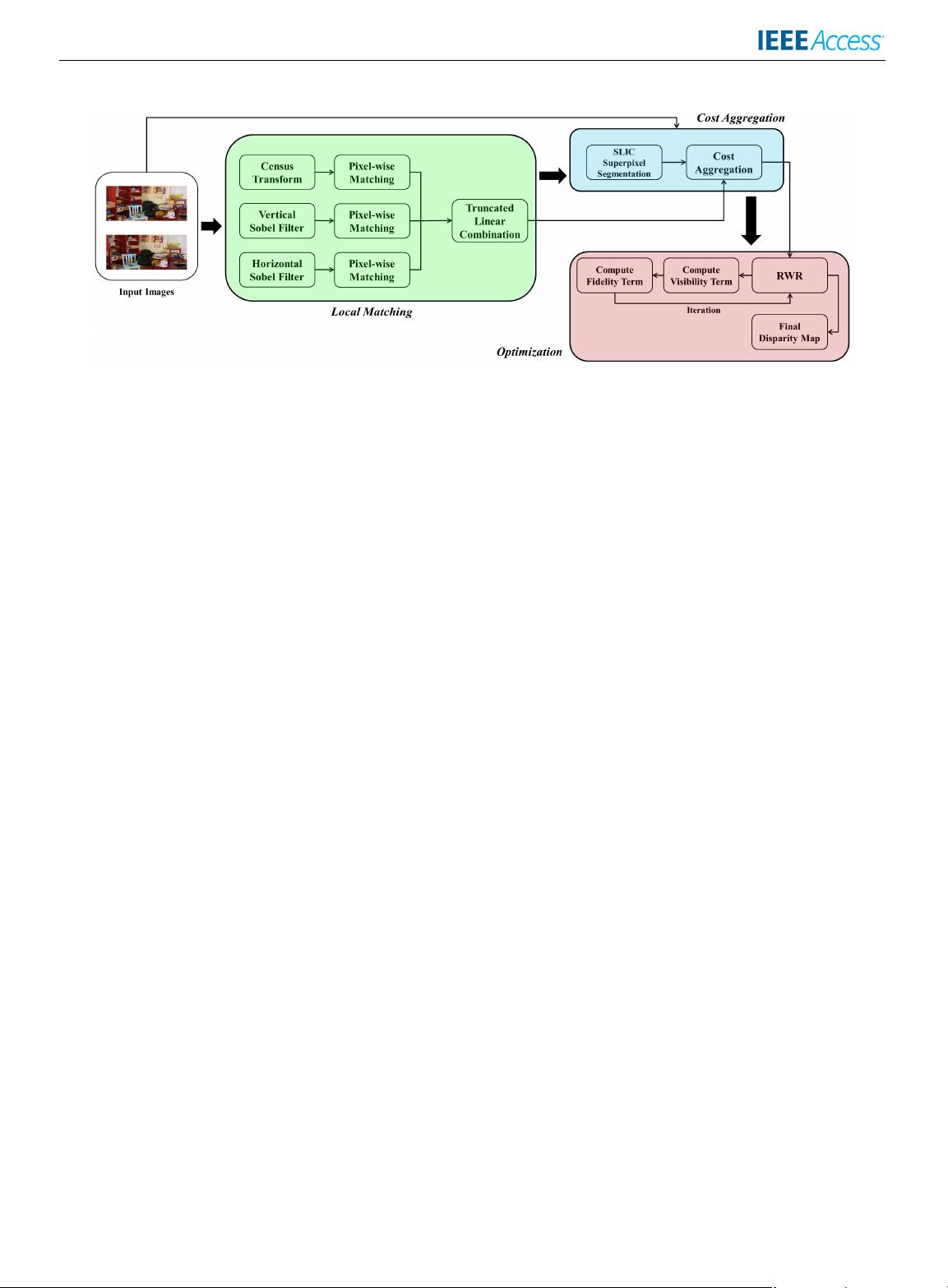
FIGURE 1. Overview of the adaptive random walk with restart.
not affected by illumination variation because of gradient and
census transform, the processing time is quite fast in compar-
ison with recently studied methods, has good performance in
both outside and inside environment and gives us the option
to have a estimation of the depth in low texture scenes.
One important advantage of this algorithm which con-
vinced us to employ it as a part of our approach, is the good
performance on high resolution images. A traditional way
to speed up stereo computation is to use image pyramids or
downsized images which also reduce the disparity range. This
down-sampling in disparity computation will cause some
small objects to be missed. The full disparity resolution for
large distance is vital for long range object detection. The
point about the chosen algorithm is that the image doesn’t
need to be down-sampled to speed up the method.
The comparison of this method with several others meth-
ods done in this paper showed that it has acceptable depth
estimation in high resolution images, 2864
∗
1924 pixels.
Acceptable depth estimation refers to the fact that the
algorithm doesn’t have the problem of estimating different
layers of depth in one object. It respects the depth layers
without conflict. This feature along with the fast process-
ing time makes this algorithm suitable for high resolution
real-time applications. Also it gives us the ability of mak-
ing a more accurate filter, which is described later in the
paper.
A. ALGORITHM DESIGN
The initial matching cost in ARWR is pixel-wise calculated
by employing census transform and gradient image matching.
Census-based matching technique or census transform was
initially introduced by Zabi in 1994 [18]. It is a form of
non-parametric local transform to map the intensity values
of the pixels within a square window to a bit string, thereby
capturing the image structure. In other words, it computes for
every pixel a binary string (census signature) by comparing
its grey value with the grey values in its neighborhood.
The census transform is robust to radiometric variations
but the noise in the local image structure is being encoded
based on the intensity of the pixels. The encoded noise brings
some matching doubts especially in the area with repetitive
or similar texture patterns.
To overcome this problem gradient image matching is
employed as part of the local matching block in ARWR.
At this stage gradient images are computed using 5 × 5
Sobel filters. The whole process of the ARWR is shown
in Fig. 1.
The green block in Fig. 1 shows the local matching block
including the transformation and matching parts.
The usual similarity criteria in stereo matching are
only strictly valid for surfaces with Lambertian (diffuse)
reflectance characteristics. Specular reflections are viewpoint
dependent and may cause large intensity difference at corre-
sponding image points. In the presence of specular reflection,
traditional stereo methods are often unable to establish any
correspondence, or the calculated disparity values tend to be
inaccurate.
In this case using the gradient image matching makes
the local matching method more robust on non-Lambertian
surfaces.
The noise variation in the local pixel-wise matching meth-
ods can be vital in term of the performance. That is why SLIC
(Simple Linear Iterative Clustering) algorithm is employed in
ARWR, the blue block in Fig. 1. SLIC is one of the common
super-pixeling methods [19].
The local measurements in the matching block are more
robust to noise variation when the super-pixels are considered
as the smallest parts of the image to be matched to the target
image. Super-pixeling is considered as an alternative to pixels
in pixel-wise matching which leads to a reduction in memory
requirements in the whole algorithm.
At the last step of the ARWR which is shown as pink
block in Fig. 1, the calculated matching cost is updated using
the RWR algorithm to determine the optimum disparity with
respect to occluded and discontinuity regions. The standard
VOLUME 4, 2016 5511
剩余10页未读,继续阅读
2020-08-26 上传
2022-12-08 上传
2021-05-22 上传
2021-05-27 上传
2021-02-06 上传
2021-02-06 上传
2021-02-09 上传
2021-02-21 上传
2012-05-25 上传

Tommy_wxie
- 粉丝: 1064
- 资源: 60
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
