Robotiq腕部相机使用手册:从安装到软件操作全面指南
需积分: 10 99 浏览量
更新于2024-07-09
收藏 49.94MB PDF 举报
"这份文档是Robotiq腕部相机的用户手册,主要针对Universal Robots的集成。这份手册提供了详细的使用、安装、软件配置以及维护等信息,帮助用户全面了解和操作Robotiq腕部相机。"
在Robotiq腕部相机的说明书里,我们可以找到以下几个关键的知识点:
1. **一般介绍** (General Presentation):
- 视觉组件 (Vision components):这部分可能涵盖了相机的基本构造和功能,包括摄像头、传感器和图像处理硬件。
2. **安全须知** (Safety):
- 警告 (Warning): 用户手册会强调使用过程中应遵循的安全规定,以避免设备损坏或人员受伤。
3. **安装** (Installation):
- 配送范围 (Scope of Delivery): 列出包装内包含的所有部件。
- 所需工具与设备 (Required Tools and Equipment): 提供安装所需的工具清单。
- 环境与操作条件 (Environmental and Operating Conditions): 说明相机的最佳运行环境和条件。
- 机械安装 (Mechanical Installation): 指导用户如何物理安装相机到UR机器人手臂上。
- 电气设置 (Electrical Setup): 包括电源连接和电气安全指南。
4. **软件** (Software):
- 安装、卸载与更新 (Installation, Uninstallation and Updates): 介绍如何安装、移除和升级配套软件。
- 快照位置 (Snapshot Position): 教程用户如何捕获和记录机器视觉中的特定位置。
- 对象教学 (Object Teaching): 说明如何让机器人学习识别和处理不同对象。
- 教学对象向导 (Teach Object Wizard): 提供一种简化对象定位的教学方法。
- CamLocate节点 (CamLocate node): 用于物体定位的软件组件。
- 扫码节点 (ScanCode node): 详细说明如何使用相机进行条形码或二维码扫描。
- 使用扫码节点 (Using the ScanCode Node): 提供使用此功能进行自动识别的步骤。
- 查找并应用视觉偏移 (Find and Apply Visual Offset nodes and Defining tags): 如何纠正定位误差和定义标记。
- 保存图像节点 (Save Image node): 教程用户如何保存在工作流程中捕获的图像。
5. **规格** (Specifications):
- 机械规格 (Mechanical Specifications): 提供相机的尺寸、重量和耐久性等信息。
- 电气和光学规格 (Electrical and Optical Specifications): 描述电源需求和相机的光学性能。
- 视觉系统规格 (Vision System Specifications): 包括分辨率、帧率和色彩深度等参数。
6. **维护** (Maintenance):
- 提供了关于定期检查、清洁和保养相机的建议。
7. **备件、套件和配件** (Spare Parts, Kits, and Accessories):
列出可用于维修或升级相机的额外组件。
8. **故障排除** (Troubleshooting):
提供常见问题及其解决方案,帮助用户快速诊断和修复问题。
9. **保修和专利** (Warranty and Patent):
详细说明了保修期限和专利信息。
10. **声明和证书** (Declarations and Certificates):
- 原始合并声明 (Original Declaration of Incorporation): 法律文件,确认产品符合相关法规。
- 其他证书可能包括CE认证、UL认证等,证明产品的质量和安全性。
这份详细的说明书是用户有效利用Robotiq腕部相机进行自动化任务的关键参考资料,涵盖了从基本操作到复杂应用的各个方面。
3. Installation
The following subsections will guide you through the installation and general setup of your Robotiq Wrist Camera.
Warning
Before installing:
l Read and understand the safety instructions related to the Vision System.
l Verify your package according to the scope of delivery and your order.
l Make sure to have the required parts, equipment and tools listed in Scope of delivery.
Warning
When installing:
l Meet the recommended environmental conditions.
l Do not operate the Vision System, or even turn on the power supply, before the device is firmly anchored and the
machine area is cleared.
3.1. Scope of Delivery
Info
The following kits include the new 5-m high flex cable that comes with the Robotiq Wrist Camera. If you have the older
10-m high flex cable, please consult the last version of this instructions manual available in the Archives section of our
support website, for more information.
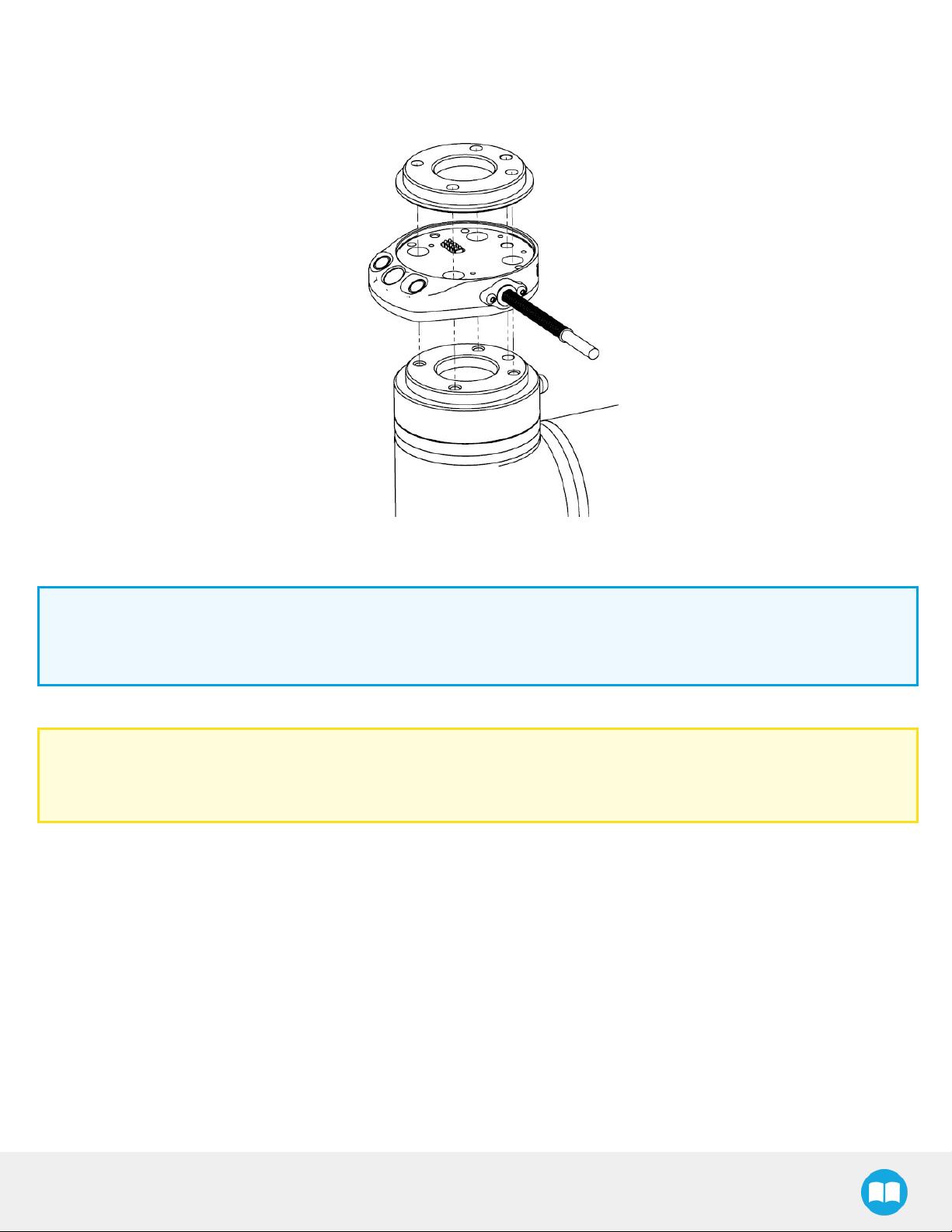
3.1.1. RWC5-UR-KIT
Includes the Wrist Camera and required hardware.
l Robotiq Wrist Camera with 5-m high flex cable
l Pattern Tool plate for ISO 9409-1-50-4-M6 (not included and not required if purchased as part of a combo)
l USB stick
l USB software license dongle
l 4-port USB hub
l Calibration board
l Colored background for object teaching
Wrist Camera -Instruction Manual
15


剩余133页未读,继续阅读
2021-08-23 上传
2022-08-08 上传
2023-02-13 上传
2023-02-13 上传
2022-07-13 上传
2023-02-13 上传
2023-02-13 上传
2023-02-13 上传
2023-02-13 上传

BFT白芙堂
- 粉丝: 1255
- 资源: 135
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
